AUTOMATISATION
Article modifié le
Composants utilisés dans l'automatisation
Information et variables d'état
Avant de classifier les composants des systèmes automatiques, il y a lieu d'examiner de quelle façon les grandeurs et les événements intervenant dans l'automatisation sont traduits en grandeurs de substitution que le système puisse traiter. L'information concernant soit la commande du système, soit les variables d'état, peut revêtir deux formes, numérique ou analogique.
– Dans la forme numérique, chacune des grandeurs qui constituent l'information est exprimée par un nombre. Pour une variable continue ou quasi continue, ce nombre, qui comporte d'autant plus de chiffres que la traduction doit être plus précise, n'appartient généralement pas au système décimal, où dix chiffres représentatifs sont utilisés, mais à un système à peu de chiffres (généralement deux : systèmes binaire ou dérivés, comme le décimal codé binaire, ou D.C.B.). Pour une variable discontinue susceptible de prendre seulement quelques états distincts – souvent deux, dits tout ou rien, ou T.O.R. –, les états sont généralement traduits par les combinaisons d'un petit nombre de chiffres (généralement deux : systèmes binaire et dérivés). Les états ci-dessus sont universellement repérés par les chiffres 0 et 1, chiffres appelés bits (de l'anglais binary units ou digits).

– Dans la forme analogique, chacune des grandeurs qui constituent l'information est susceptible de variation continue ; chaque grandeur (physique) est traitée par un « transducteur » qui la transforme en une autre grandeur physique (le plus souvent électrique) qui lui est proportionnelle (ou, au moins, lui correspond de façon biunivoque).
La traduction numérique, ou codage, des grandeurs physiques continues est un problème généralement résolu par des méthodes électroniques (utilisation d'amplificateurs, de circuits logiques, voire de microprocesseurs), parfois associées à des moyens optiques ou mécaniques. Les grandeurs ainsi codées peuvent se trouver brouillées par des signaux parasites apparaissant en particulier sur les lignes de transmission, qui doivent donc être protégées. Une façon efficace de protéger les signaux est de les transformer en impulsions lumineuses par des convertisseurs opto-électroniques (phototransistors, photodiodes, diodes lasers) et de les transmettre par des fibres optiques, ce qui permet de transférer une grande quantité de signaux par unité de temps sans risque de brouillage.
Cette observation est particulièrement importante pour les utilisations militaires, où l'une des causes les plus redoutées de brouillage est le rayonnement électromagnétique causé par les explosions nucléaires (techniques de « durcissement »).
Pour les variables discontinues, exprimées principalement en binaire, dont le traitement est communément baptisé logique, on fait appel tant aux domaines électrique et électronique qu'aux domaines pneumatique, hydraulique et mécanique. Les techniques de logique utilisent une famille de cellules élémentaires connectées les unes aux autres. Par commodité, ces cellules seront désignées ici sous le vocable très usité de circuits logiques.
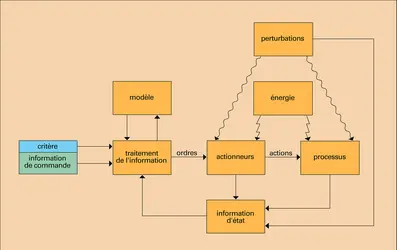
Processus d'action : structure
Encyclopædia Universalis France
Un tel circuit comprend essentiellement une entrée, une sortie et un apport d'énergie auxiliaire ; il est construit pour recevoir, à son entrée, des signaux issus des sorties de circuits similaires et pour émettre, à sa sortie, un signal qui sera reçu par les entrées de circuits similaires. Ces signaux ne peuvent avoir que deux valeurs, parfaitement distinctes l'une de l'autre, dites états, qui sont repérées conventionnellement par les chiffres 0 et 1.

Circuit logique : représentation symbolique
Encyclopædia Universalis France
Les circuits logiques ont couramment plusieurs entrées et plusieurs sorties. Il existe une combinaison deux à deux de circuits logiques, dite mémoire ou bascule, dont l'état de sortie est conservé après disparition du signal qui avait provoqué son apparition. Les assemblages de mémoires élémentaires forment des registres, des compteurs, etc., constamment employés en automatisme séquentiel.
En technique électrique, les ensembles logiques sont constitués par des relais électromécaniques.
En technique électronique, les circuits logiques ont d'abord été réalisés au moyen de transistors (commandés en tout ou rien) et de résistances, puis par des assemblages de jonctions transistors et d'éléments équivalents à des résistances, réalisés en couches minces à l'échelle microscopique, portant le nom de circuits intégrés. Cette technique permet une très grande « densité » des ensembles logiques.
Cette densité ne cesse de croître avec les progrès des moyens de production de la microélectronique. On peut ainsi disposer, sur une seule pastille de silicium, de registres de mémoire d'une capacité considérable, de sorte que des variables numériques codées en mots de 8 ou 16 bits et même 32 bits (c'est-à-dire avec précision) peuvent être stockées par centaines de milliers. Cela a permis de réaliser dès la fin des années 1970, avec quelques boîtiers plats de quelques centimètres carrés de surface, l'équivalent d'une unité centrale d'un ordinateur classique avec une large capacité de mémoire et un temps de cycle court – inférieur à la microseconde.
Infiniment plus performants, les microprocesseurs modernes permettent, dans les automatismes d'aujourd'hui, des traitements d'information décentralisés. Ils sont particulièrement utiles pour :
– le codage des grandeurs physiques intervenant dans l'automatisation et leur traitement par fonction de transfert, linéaire ou non ;
– le filtrage par logiciel du bruit et des valeurs erratiques (traitement dans les capteurs ou en association avec eux) ;
– la transmission des informations au moyen de lignes de communication (transmission asynchrone en série des bits composant les informations sur des lignes de plus en plus rapides) ;
– le traitement des variables d'état pour réaliser les conditions optimales de stabilité et de performance des systèmes bouclés ;
– la gestion des alarmes et des signaux de service.
On ne saurait donner ici ne serait-ce qu'un aperçu du vaste domaine des capteurs et transducteurs destinés à transformer une grandeur physique en un signal analogique ou numérique. Les réalisations sont innombrables dans les domaines de la dynamique et de la cinématique, de la physico-chimie (débits, pressions, volumes, températures), de l'optique (y compris l'analyse d'image) et de l'acoustique.
On distingue, en particulier en robotique, les capteurs « proprioceptifs », qui permettent de contrôler les déplacements relatifs des parties d'un système les unes par rapport aux autres, des capteurs « extéroceptifs », destinés à fournir des renseignements sur l'environnement ; ces derniers demeurent en continuel développement.
Une grande variété de moyens sont mis à la disposition des automaticiens dans le domaine du traitement des signaux analogiques : amplification, transformation mathématique simple indépendamment de la variable temps, ou au contraire en fonction de cette variable (intégration, dérivation). Il a été longtemps fait appel à une gamme complète de dispositifs électroniques effectuant ces opérations sans difficulté avec une bonne précision : les amplificateurs opérationnels. Cette technologie est aujourd'hui dépassée par les traitements algorithmiques. Ainsi, la facilité de traitement des signaux numériques apportée par les microprocesseurs assure une précision supérieure, y compris pour les signaux évoluant rapidement ; elle tend à systématiser les méthodes numériques aux dépens des méthodes analogiques. Il est alors possible de rejeter par traitement informatique les données erratiques et le « bruit ».
Les deux types de traitement coexistent dans les mêmes systèmes et il faut donc pouvoir convertir les signaux analogiques en signaux numériques et vice versa. C'est le rôle des convertisseurs analogique-numérique et numérique-analogique, composants essentiels des systèmes automatiques.
On évoquera ici, pour être complet, les technologies qui utilisent, tant pour les capteurs que pour les traitements analogiques et la logique séquentielle, des composants dont l'élément actif est un fluide, en particulier l'air ou un gaz comprimés. Elles ont connu leur heure de gloire dans les installations où les liaisons électriques sont redoutées (atmosphères explosibles, prescriptions de sécurité intrinsèque). Elles sont associées à des actionneurs de la même famille et conduisent à des solutions rustiques et toujours appréciées pour leur économie et leur robustesse.
Actionneurs
Le rôle des actionneurs est de commander le processus à partir des ordres émis par le système de traitement de l'information, dans le langage d'information du système. Les actionneurs gouvernent les échanges d'énergie des organes principaux du processus.
Quand l'information de « sortie » est donnée sous forme logique, donc discrète, les actionneurs les plus répandus sont : en technique électrique, les contacteurs électromagnétiques et les électrovannes ; en technique électronique, les amplificateurs de puissance par tout ou rien (transistors, thyristors, thyristors à extinction commandée, dits G.T.O. – Gate Turn Over) ou encore les convertisseurs dits « hacheurs (choppers) » qui sont fondés sur l'emploi de nouveaux composants électroniques de puissance (transistors de grande puissance tout ou rien IGBT – insulated gate bipolar transistor – ou une variante à commutation rapide du thysistor G.T.O. dénommée IGCT – integrated gate commutated thyristor) ; en technique des fluides, les vannes, les distributeurs, les vérins, les vannes commandées par fluides.
Quand l'information est à variation continue, les actionneurs les plus répandus sont :
– En électricité, les moteurs à vitesse variable, soit à courant continu, soit à courant alternatif de fréquence variable. Les premiers sont désormais tous alimentés par des redresseurs commandés à semiconducteurs (transistors, thyristors, thyristors G.T.O.), assurant, si nécessaire, la fourniture du couple dans les deux sens avec les deux sens de rotation, c'est-à-dire l'échange de l'énergie dans les deux sens. Les seconds, de type synchrone ou de type asynchrone à cage suivant les cas, sont alimentés par des convertisseurs de fréquence utilisant les mêmes types de semiconducteurs. Il est désormais possible d'introduire dans les régulateurs électroniques de commande des convertisseurs des circuits correcteurs des réactions d'induit, de sorte que les performances peuvent être alignées sur celles des moteurs à courant continu. Les moteurs alternatifs, plus fiables et moins sensibles à l'environnement, permettent de mieux résoudre le problème de l'adaptation du moteur à la charge entraînée. Ils permettent aussi l'accès aux plus grandes vitesses et aux plus grandes puissances. L'arrivée sur le marché d'aimants à hautes performances a permis de réaliser des servomoteurs électriques très robustes, à faible inertie et de grande qualité, de type continu, synchrone, et même à réluctance variable.
– En hydraulique, les moteurs associés à des pompes à débit variable – ces derniers présentant un avantage par rapport aux moteurs électriques sur le plan des inerties et des encombrements –, ou encore les vérins contrôlés par des servovalves, au besoin à débit variable et contrôlées elles-mêmes électroniquement.
Il faut aussi mentionner les moteurs « pas à pas ». Commandés électroniquement, ces moteurs ont la particularité de tourner par bonds successifs d'un angle fixe dit incrément. Lorsqu'ils reçoivent un train de n impulsions, ils procèdent de n incréments ; il s'agit d'une façon très simple de commander un positionnement d'organe mécanique sans asservissement. Ces moteurs appartiennent à la famille des moteurs à réluctance variable. Ils peuvent être équipés d'un amplificateur de couple hydraulique.
Les actionneurs ont pour mission de gouverner les transferts d'énergie à partir de signaux issus de système d'automatisation. Il est nécessaire qu'ils répondent avec précision, fidélité, rapidité aux signaux de commande. Comme ils ne possèdent pas toujours toutes ces qualités, et que les signaux de commande sont « à bas niveau » (ils doivent donc être amplifiés), il est souvent nécessaire d'associer à chacun de ces actionneurs un système d'amplification et des capteurs en contre-réaction, afin de constituer un système asservi. De cette façon, ils sont doués des qualités requises. Cela est de pratique courante pour les servomoteurs de positionnement, les moteurs à vitesse variable, les vérins hydrauliques.
Aux actionneurs, dont la tâche est le mouvement des solides, sont généralement associés des mécanismes dont le fonctionnement peut être décrit par ce que l'on appelle la chaîne cinématique.
La chaîne cinématique des robots est un exemple très représentatif de l'agencement des actionneurs d'automatisation mettant en œuvre des asservissements.

Mémoire à circuits logiques
Encyclopædia Universalis France
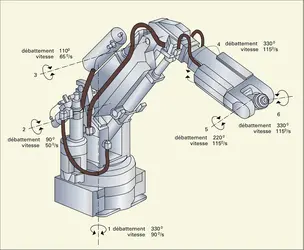
Un robot se compose, facultativement, d'un véhicule qui le positionne à portée de ses tâches et, obligatoirement, d'un porteur qui a pour rôle d'amener l'organe terminal dans un endroit précis. Le positionnement du porteur par rapport au véhicule comporte au moins trois degrés de liberté (rotations indépendantes 1, 2, 3 ; pas de translation). L'organe terminal (pince ou outil) exige lui-même trois degrés de liberté (rotations indépendantes 4, 5, 6 ; pas de translation). Un robot a donc au moins six degrés de liberté. L'existence d'un véhicule ou d'un bras télescopique augmenteront le nombre de degrés de liberté.
Rôle des ordinateurs

Automatisation: poste de commande d'un haut-fourneau
Voestalpine
Pour commander rationnellement les mouvements de cette chaîne mécanique articulée complexe, il faut en avoir une représentation sous forme d'équations, c'est-à-dire un modèle. Moyennant certaines hypothèses simplificatrices, ce modèle est un algorithme de relations vectorielles traduites en matrices (modèle géométrique), corrigé de conditions restrictives sur les efforts, vitesses et courses de déplacement, des conditions d'anticollision (modèle cinématique) et d'autres conditions restrictives sur les efforts et contraintes internes (modèle dynamique).
Si l'on veut, par exemple, seulement télécommander, puis mémoriser un certain nombre de gestes de l'outil, l'expérience montre qu'il vaut mieux avoir recours à un ordinateur pour élaborer, en temps réel, les signaux de commande (références) des asservissements, grâce à ces modèles.
Le rôle de l'ordinateur est :
– de traiter l'information donnée par les capteurs et les consignes (provenant plus ou moins directement des commandes opérateurs) pour produire les ordres destinés aux actionneurs ;
– d'optimiser le processus commandé, ce qui nécessite une identification de celui-ci sur un modèle ; ce dernier résulte d'une étude mathématique et peut être auto-adaptatif, c'est-à-dire qu'il ajuste lui-même certains paramètres par des tests qu'il effectue en cours d'exploitation ;
– de réaliser le dialogue homme-machine (envoi des ordres et réception de comptes rendus analytiques, affichage des grandeurs mesurées).
Les composants essentiels du système informatique sont :
– une unité centrale (ordinateur) comprenant une mémoire d'accès rapide, les registres de traitement et d'entrée/sortie ;
– une ou plusieurs mémoires de masse ;
– des convertisseurs de signaux analogique-numérique et vice versa ;
– les circuits d'entrée/sortie et leurs moyens de transmission vers les capteurs, les actionneurs, les alarmes, le système de dialogue homme-machine ;
– les moyens du dialogue homme-machine (écrans cathodiques, écrans plats à cristaux liquides ou à plasma, utilisation de « menus et de souris », écrans plats tactiles, claviers alphanumériques, afficheurs, boutons poussoirs et voyants lumineux) ; à ces moyens « classiques », il convient d'ajouter la reconnaissance vocale, laquelle est appréciée lorsque les opérateurs n'ont pas les mains libres et ont à désigner une tâche par l'élocution de quelques mots ;
– les imprimantes pour comptes rendus et programmation ;
– les logiciels (logiciel spécifique, en langage évolué, logiciels de base, procédures et protocoles).
On peut dégager quatre tendances dans la conception des systèmes informatiques de l'automatisation :
– importance du confort du dialogue homme-machine, qui suppose l'emploi d'écrans en couleurs avec toute une panoplie de symboles et graphismes pour fournir des informations sous forme de schémas ; différentes « photographies » peuvent être présentées sur demande, avec grossissement « à la loupe » de points particuliers ; ainsi, les appareils de mesure classiques à cadran et aiguille se font rares, et l'opérateur ne se déplace plus le long de tableaux de dizaines de mètres, comme par le passé.
– limitation des commandes à quelques manettes et pédales ;
– emploi de langages évolués pour le logiciel afin de traiter des modèles mathématiques de plus en plus complexes ;
– décentralisation des traitements informatiques (traitement au niveau des capteurs, des actionneurs, du dialogue homme-machine) et hiérarchisation des fonctions (échanges entre les systèmes d'automatisation et les systèmes de gestion d'une unité de production) ;
– liens avec les grands systèmes comme, par exemple, consultation, via Internet, de grandes bases de données en temps quasi réel ou encore recours à la localisation géographique par satellites grâce au système G.P.S.
Là où l'ordinateur, avec son langage évolué, l'importance de sa mémoire, la rapidité de son traitement, est trop coûteux, on lui préfère l' automate programmable. Ce dernier a la même architecture qu'un petit ordinateur ; mais, pour des raisons d'économie, une partie de sa mémoire ainsi que les logiciels de compilation ou d'interprétation ont été sacrifiés. Le langage de la machine est un langage peu évolué, accessible aux non-informaticiens, et proche du mode de pensée des électriciens.
L' automate programmable est conçu pour traiter surtout des problèmes de logique séquentielle, des signaux de type tout ou rien, mais peu ou pas de calculs arithmétiques. De ce fait, il traite rapidement, et c'est son atout.
Devant la diversité des automates programmables existants et des langages associés, il est devenu nécessaire de créer une méthodologie de rédaction du logiciel de ces appareils. Il s'agit d'une méthode d'analyse des processus de type graphique permettant de rationaliser la structure des programmes. La plupart des machines françaises ont adopté une procédure normalisée appelée Grafcet.
On recherche désormais la décentralisation des traitements et la hiérarchisation des fonctions ; de plus, les systèmes automatisés sont de plus en plus étendus : les liaisons de transfert d'information de plusieurs kilomètres ne sont pas rares.
En réponse à ces besoins, on a créé des architectures de systèmes dont les caractéristiques sont les suivantes :
– fonctions d'automatisme réparties ;
– mise en commun de données ;
– liaisons intermachines « transparentes » ;
– conduite centralisée.
De telles architectures s'articulent obligatoirement autour de réseaux locaux d'interconnexion entre machines programmables, supports d'une base de données commune, dont l'accès doit être transparent à partir de chacune des machines distribuées.
Pour les contrôles de processus (à réactions généralement lentes), on dispose de lignes de communication, dites bus, capables de transférer de grands volumes d'information (beaucoup de points de mesures gérés), quitte à ce que ces informations ne soient pas très souvent mises à jour (« rafraîchies »). Pour le contrôle des portions du système regroupées autour d'une fonction locale, associée, par exemple, à des mouvements mécaniques, des réglages de vitesses d'organes mécaniques, des enchaînements qui réclament des interventions fréquentes et rapides, on dispose de bus locaux qui ne peuvent transférer que de petits volumes d'information, mais qui sont capables de rafraîchir cette information très souvent.
Lorsqu'un grand système automatise un processus complexe, ce dernier est sous la dépendance de multiples fonctions locales qui en assurent le bon déroulement, tandis que lui-même est soumis à des directives générales qui lui viennent « d'en haut » (intervention humaine directe, ou consignes élaborées par un autre système de hiérarchie supérieure : par exemple, le système de gestion des commandes clients et des stocks). Le recours à Internet permet de perfectionner considérablement la transmission de ces directives.
Ainsi, l'architecture d'automatisme d'un tel système comprend un réseau de communication, processus bâti autour d'un bus à grande capacité et à faible taux de renouvellement des informations et de plusieurs réseaux de communication locaux, bâtis chacun autour d'un bus à capacité plus modeste, mais à fort taux de renouvellement des informations.
Robot Acma Y28 pour soudage à l'arc
Encyclopædia Universalis France
Divers sous-ensembles spécialisés sont répartis le long de ces bus en fonction des besoins ; la figure donne une représentation symbolique de cette architecture.
Ce type d'architecture, conçu pour le contrôle des processus continus (tels que le laminage de bandes d'acier ou la synthèse chimique), est aussi applicable aux processus discontinus (ateliers d'usinage ou de montage en mécanique, utilisant robots et centres d'usinage). Dans ce dernier cas, les réseaux locaux sont intégrés dans les robots ou les centres d'usinage. À titre d'exemple, un robot à six degrés de liberté (dit à six axes) est équipé au minimum d'une unité pilote à microprocesseur et de six unités esclaves à microprocesseur ; l'unité pilote dialogue avec le système de hiérarchie supérieure.
Ces architectures comportent de nombreux logiciels standards destinés aux transferts d'information par les bus, et au dialogue homme-machine (par exemple, préparation des représentations graphiques).
Accédez à l'intégralité de nos articles
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Jean VAN DEN BROEK D'OBRENAN : ingénieur conseil
Classification
Médias
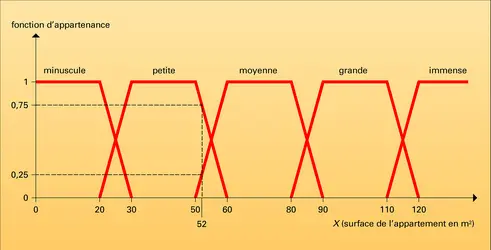
Variable linguistique
Encyclopædia Universalis France
Processus d'action : structure
Encyclopædia Universalis France
Circuit logique : représentation symbolique
Encyclopædia Universalis France
Autres références
-
AGHION PHILIPPE (1956- )
- Écrit par Olivier MARTY
- 1 173 mots
- 1 média
 Une deuxième idée-force de l’économiste concerne leseffets de l’automatisation. À rebours des thèses pessimistes véhiculées tant dans le débat public que par une partie du monde académique, Aghion voit dans celle-ci une source d’efficacité, de profits et donc de développements favorables à l’emploi....
Une deuxième idée-force de l’économiste concerne leseffets de l’automatisation. À rebours des thèses pessimistes véhiculées tant dans le débat public que par une partie du monde académique, Aghion voit dans celle-ci une source d’efficacité, de profits et donc de développements favorables à l’emploi.... -
ALGORITHME
- Écrit par Alberto NAIBO et Thomas SEILLER
- 5 919 mots
- 4 médias

La notion d’algorithme a envahi nos discours et nos pratiques, en raison surtout de la diffusion massive d’applications informatiques dédiées à l’exécution automatisée de certaines tâches, ou à la résolution de certains problèmes. On trouve en effet les algorithmes non seulement dans de nombreux domaines...
-
ANALYTIQUE CHIMIE
- Écrit par Alain BERTHOD et Jérôme RANDON
- 8 890 mots
- 4 médias
 Les progrès de la chimie, de la biochimie, de l'électronique, de la micro-informatique, de la robotique et de la miniaturisation permettentd'automatiser un grand nombre de procédures d'analyse autrefois longues et laborieuses. L'utilisation de l'appareillage devient plus simple et plus fiable. Par...
Les progrès de la chimie, de la biochimie, de l'électronique, de la micro-informatique, de la robotique et de la miniaturisation permettentd'automatiser un grand nombre de procédures d'analyse autrefois longues et laborieuses. L'utilisation de l'appareillage devient plus simple et plus fiable. Par... -
AUTOMATIQUE
- Écrit par Hisham ABOU-KANDIL et Henri BOURLÈS
- 11 647 mots
L' automatique est la science des systèmes. Ce dernier terme doit être entendu ici non pas comme une totalité close sur elle-même, mais au contraire comme un ensemble d'éléments (dits « sous-systèmes ») en interaction, ensemble qui est lui-même en interaction avec un environnement constitué d'autres...
- Afficher les 38 références
Voir aussi
- MOTEURS ÉLECTRIQUES
- CODAGE
- PROGRAMME, informatique
- COMMANDE
- POMPES
- TRANSISTORS & THYRISTORS
- ASSERVIS SYSTÈMES
- ADAPTATIFS SYSTÈMES
- SÉQUENTIELS AUTOMATISMES
- ACTIONNEURS
- RÉGULATEUR
- AUTOMATISMES
- SERVOMÉCANISMES
- FORMES RECONNAISSANCE DES
- RÉSEAUX LOCAUX, informatique
- BINAIRE SYSTÈME
- ENTRÉE-SORTIE
- BIODYNAMIQUES SYSTÈMES
- CIRCUITS LOGIQUES
- CAPTEURS
- TRANSDUCTEURS
- VÉRINS
- INFORMATION, informatique et télécommunications
- DEGRÉ DE LIBERTÉ
- THYRISTOR
- ALGORITHMES GÉNÉTIQUES
- LAMINAGE
- RELATIONS, mathématiques
- SOUS-ENSEMBLE ou PARTIE D'UN ENSEMBLE, mathématiques
- TEMPS RÉEL
- DÉDUCTION
- CLASSIFICATION
- ÉVÉNEMENT, mathématiques
- VARIABLE, mathématiques
- CONTRÔLE, informatique et automatique
- GESTION INTÉGRÉE
- LOGIQUE FLOUE
- POSSIBILITÉ, logique floue
- APPRENTISSAGE, informatique et robotique
- ANALOGIQUE SIGNAL
- NUMÉRIQUE SIGNAL
- SIGNAL TRAITEMENT DU
- MICROPROCESSEUR
- APPARTENANCE RELATION D'
- BUS, informatique
- APPROXIMATION
- NON-LINÉAIRE SYSTÈME
- PRODUCTIQUE
- SYSTÈME EXPERT
- DIALOGUE HOMME-MACHINE
- LOGIQUES NON CLASSIQUES
- ATELIER FLEXIBLE
- ZADEH LOTFI A. (1921- )
- ENSEMBLES FLOUS THÉORIE DES
- MOTEURS PAS À PAS
- FLEXIBILITÉ, productique
- SERVOMOTEUR
- MODÈLE, mathématiques
- CLASSIFICATION AUTOMATIQUE
