
SYMBOLIQUE CALCUL
Article modifié le
Applications de la transformation de Laplace
L'application la plus répandue de la transformation de Laplace est la résolution des équations de convolution, et en particulier des équations différentielles linéaires à coefficients constants. Soit l'équation de convolution a * x = b, où a, b et x sont des fonctions à support positif. Si a, b, x ont des transformées de Laplace A, B, X, on aura :


La résolution de l'équation de convolution se ramène donc à la résolution d'une équation algébrique et à la recherche d'un élément ayant une transformée de Laplace donnée. Il est intéressant de noter que, pour les distributions à support positif, la convolution n'a pas de diviseurs de zéro. Une équation de convolution sur R+ ne peut donc avoir qu'une solution. Si l'usage de la transformation de Laplace fournit une solution (c'est-à-dire si a et b ont des transformées de Laplace et si B(p)/A(p) est la transformée de Laplace d'une distribution), celle-ci est l'unique solution de l'équation.
Exemple 1. Soit à résoudre l'équation différentielle :


Si l'on ne s'intéresse qu'aux valeurs de x(t) pour t ≥ 0, on peut aussi bien supposer x(t) = 0 pour t < 0, à condition naturellement de supposer que le second membre est remplacé par 0 pour t < 0. Les conditions initiales indiquent alors des discontinuités de x(t) et de dx/dt pour t = 0 ; et, pour en tenir compte, il suffit d'introduire les dérivées au sens des distributions :
L'équation différentielle se récrit alors :



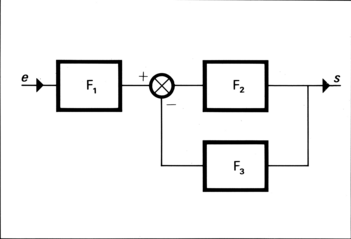
Automatique : application de la transformation de Laplace
Encyclopædia Universalis France
Soit X la transformée de Laplace de x. On obtient :






La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Robert PALLU DE LA BARRIÈRE : professeur à l'université de Paris-VI
Classification
Médias

Transformées de Laplace
Encyclopædia Universalis France
Automatique : application de la transformation de Laplace
Encyclopædia Universalis France

Transformées en z de suites simples
Encyclopædia Universalis France
Autres références
-
CLEBSCH RUDOLF FRIEDRICH ALFRED (1833-1872)
- Écrit par Jeanne PEIFFER
- 836 mots
Le mathématicien allemand Rudolf Friedrich Alfred Clebsch est né le 19 janvier 1833 à Königsberg (auj. Kaliningrad) et mort le 7 novembre 1872 à Göttingen. Il fit ses études à l'université de sa ville natale (1850-1854). Quoique Jacobi ne donnât plus de cours, l'école qu'il avait fondée...
Voir aussi
