
CINÉMATIQUE
Cinématique du solide
Étudier le mouvement d'un solide, c'est être en mesure d'indiquer la trajectoire, la vitesse et l'accélération de tous les points qui lui sont liés. Le premier de ces trois objectifs n'admet pas de réponse générale : sauf cas particuliers, les trajectoires des différents points liés à un solide n'ont aucun rapport simple ; ainsi, dans le mouvement „en ligne droite“ d'une bicyclette, un point lié à un moyeu de roue admet une trajectoire rectiligne par rapport au sol (il est immobile par rapport au cadre), tandis qu'un point de la bande de roulement d'un pneumatique (supposé rigide) admet une trajectoire cycloïdale par rapport au sol (et circulaire par rapport au cadre).
Par contre, dès que sont connues la vitesse et l'accélération d'un point lié au solide, et que la manière dont varie en fonction du temps l'orientation du solide (S) dans le repère (R) est précisée, les vitesses et les accélérations de tous les points liés au solide peuvent être évaluées.
Pour orienter un solide (S) dans un repère (R), on utilise les vecteurs xS, yS, zS, et pour étudier les variations de cette orientation en fonction du temps, on étudie les variations des vecteurs xS, yS, zS par rapport aux vecteurs (x, y, z) de la base du repère (R). Il ne peut se présenter que trois cas :
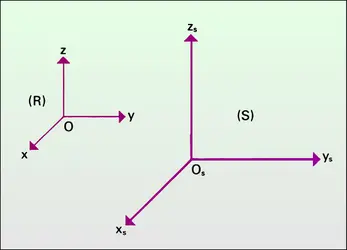
Translation
Encyclopædia Universalis France
– ou bien xS, yS, zS sont indépendants du temps et l'on dit que le mouvement du solide (S) par rapport au repère (R) est un mouvement de translation ou encore que (S) est en translation par rapport à (R) ; on peut alors, sans restreindre la généralité du problème, supposer que xS = x, yS = y, zS = z (cas du mouvement d'un tiroir par rapport à une table où il coulisse, ou inversement mouvement de la table par rapport au tiroir) ; les dérivées x′S, y′S, z′S sont nulles (fig. 4) ;

Orientation angulaire
Encyclopædia Universalis France
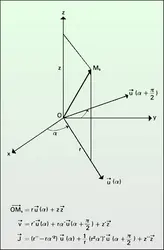
– ou bien l'un des trois vecteurs xS, yS, zS est indépendant du temps ; on peut, sans restreindre la généralité du problème, supposer que zS = z (cas du mouvement de la Terre par rapport au Soleil) ; dans ce cas l'orientation angulaire de (S) par rapport à (R) est caractérisée par la fonction :

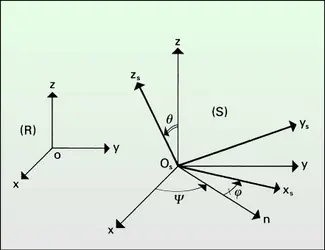
Angles d'Euler
Encyclopædia Universalis France
– ou bien les trois vecteurs xS, yS, zS dépendent du temps ; dans ce cas (mouvement d'une toupie, par exemple) l'orientation angulaire de (S) par rapport à (R) est précisée en général par la donnée de trois angles ; on choisit souvent les angles d'Euler ainsi définis : n étant un vecteur unitaire (dit nodal) orthogonal à z et à zS, ces trois angles sont la précession Ψ (t) = (x, n) mesurée sur z, la nutation θ (t) = (z, zS) mesurée sur n, la rotation propre ϕ (t) = (n, xS) mesurée sur zS(fig. 6). L'étude des variations de l'orientation d'un solide (S) par rapport à un repère (R) comporte la démonstration du fait que, dans tous les cas, il existe un vecteur ωRS tel que eS = ωRS ∧ eS, où eS est l'un des vecteurs unitaires xS, yS ou zS ; le vecteur ω = ωRS est appelé le taux de rotation du solide (S) dans le repère (R).
Si le solide (S) est en translation par rapport à (R), son taux de rotation est nul ; si le mouvement de (S) par rapport à (R) est tel qu'un axe lié à (S) garde une orientation constante dans (R), le taux de rotation ωRS est égal à α′ z ; si l'orientation angulaire de (S) par rapport à (R) fait intervenir les trois angles d'Euler, le taux de rotation est égal à Ψ′z + θ′n + ϕ′zS. Dérivant alors par rapport au temps dans le repère[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Médias
Solide invariable
Encyclopædia Universalis France
Représentation cylindro-polaire
Encyclopædia Universalis France
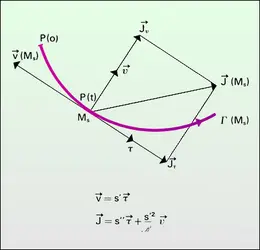
Accélération tangentielle
Encyclopædia Universalis France
Autres références
-
EINSTEIN ALBERT (1879-1955)
- Écrit par Michel PATY
- 6 493 mots
- 7 médias
 ...durées dans le système considéré au repos par rapport à ces grandeurs définies dans le système en mouvement :Ce sont des propriétés physiques de nature cinématique. Il déduisit également la nouvelle formule relativiste d'addition des vitesses :
...durées dans le système considéré au repos par rapport à ces grandeurs définies dans le système en mouvement :Ce sont des propriétés physiques de nature cinématique. Il déduisit également la nouvelle formule relativiste d'addition des vitesses :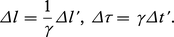 pour des vitesses colinéaires v et w), qui gouverne...
pour des vitesses colinéaires v et w), qui gouverne...
-
ENGRENAGES
- Écrit par Michel CAZIN et Étienne GAIGNEBET
- 2 143 mots
- 9 médias
 Étant donné un repère de référence que l'on notera (O), repère lié à un bâti, et deux solides S1 et S2 tournant autour d'axes fixes par rapport à (O) : Δ0,1, Δ0,2, on recherche les surfaces de contact Σ1 et Σ2 de S1 et de S2 pour qu'une rotation de S1 entraîne une rotation...
Étant donné un repère de référence que l'on notera (O), repère lié à un bâti, et deux solides S1 et S2 tournant autour d'axes fixes par rapport à (O) : Δ0,1, Δ0,2, on recherche les surfaces de contact Σ1 et Σ2 de S1 et de S2 pour qu'une rotation de S1 entraîne une rotation... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS , Claude FRANÇOIS et Bernard LE FUR
- 8 791 mots
- 4 médias
 Imaginons à l'intérieur d'un fluide une surface fermée entourant un point M, à l'intérieur de laquelle se trouvent, à un instant donné t, un certain nombre de molécules dont le centre d'inertie se déplace avec une certaine vitesse. Lorsque les dimensions de la surface tendent...
Imaginons à l'intérieur d'un fluide une surface fermée entourant un point M, à l'intérieur de laquelle se trouvent, à un instant donné t, un certain nombre de molécules dont le centre d'inertie se déplace avec une certaine vitesse. Lorsque les dimensions de la surface tendent... -
FORME
- Écrit par Jean PETITOT
- 27 344 mots
...mouvement qui en est le phénomène. La mécanique doit se restreindre à la légalisation catégoriale et à la détermination mathématique de ce phénomène. Kant développe alors une lecture transcendantale d'abord de la cinématique (le groupe de la relativité galiléenne) et ensuite de la mécanique (lois... - Afficher les 13 références
