
CINÉMATIQUE
Cinématique des systèmes de solides
Principes
On vient de voir précédemment que la situation d'un solide (S) dans un repère (R) dépend très généralement de la donnée de six fonctions du temps, à savoir trois coordonnées d'un point lié au solide (S) et trois angles caractérisant l'orientation de (S). On désignera par qα(t) l'une quelconque de ces six fonctions du temps (α = 1, 2, ..., 6). Dans bien des cas le repère (R) sera lui-même un repère géométrique lié à un solide (R), par conséquent la position d'un solide (S) par rapport à un autre solide (R) dépend très généralement de six paramètres.
On dit qu'on établit une liaison entre (S) et (R) si l'on suppose que les fonctions qα(t), q′α(t) et t obéissent à l'identité :

On dit qu'on établit l liaisons (1 ≤ l ≤ 5) entre (S) et (R) si l'on suppose que qα, q′α et t obéissent aux identités :

Soit maintenant un ensemble de p solides, considérés dans un ordre arbitraire, mais précisé (par exemple, celui du montage) et supposons que cet ordre soit justement celui des nombres j avec j = 1, 2, ..., p. Tout ce qui a été dit à propos de (S) et (R) en ce qui concerne les liaisons, les trajectoires, les vitesses et les accélérations peut être répété à propos des solides k et k + 1 (où k = 1, ..., p — 1). Cette « chaîne » de solides dépend de 6 p paramètres et est soumise à L liaisons (0 ≤ L ≤ 6 p — 1), chacune de ces L liaisons étant réalisée par un système physique convenablement choisi ou par contact entre solides. Dans le cas où la situation de cette chaîne peut être effectivement précisée à l'aide de (6p — L) paramètres indépendants, on dit que la chaîne a (6p — L) degrés de liberté.
Chaînes usuelles de solides
Une sphère (S) reste au contact d'un plan (R) (que l'on prend comme plan Oxy) ; le système de ces deux solides est soumis à une liaison : la cote z du centre de la sphère doit être égale au rayon a de la sphère, si l'on suppose que le contact a lieu du côté des cotes positives, et z – a = 0. Cette liaison laisse la possibilité de situer (S) dans (R) par les cinq paramètres indépendants x, y, ψ, θ, ϕ. Si l'on impose qu'il n'y ait pas de glissement au point de contact M de (S) et de (R), il y a lieu de traduire que MM {RS}= 0, ce qui introduit deux nouvelles liaisons :

Ces liaisons ne laissent plus la possibilité de situer (S) dans (R) à l'aide de paramètres indépendants choisis parmi x, y, ψ, θ, ϕ.
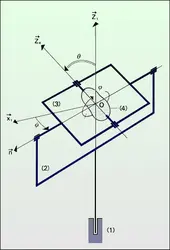
Suspension de Cardan
Encyclopædia Universalis France
Si un solide (S) a un axe fixé par rapport à (R), on peut supposer que OS = O et que zS = z. Une telle fixation s'appelle un rotoïde ; elle permet de laisser au solide (S) un degré de liberté α par rapport à (R). L'axe Oz est appelé axe du rotoïde. Dans une suspension à la Cardan (fig. 7) à trois degrés de liberté, le mouvement du solide (4) par rapport au bâti (1) dépend des valeurs des trois angles d'Euler indépendants l'un par rapport à l'autre, ψ, θ, ϕ : le solide (2) est lié au bâti (1) par une articulation rotoïde d'axe Oz1 (le solide (2) est l'armature externe du cardan) ; le solide (3) est lié au solide (2) par une articulation rotoïde d'axe Onorthogonal à Oz1 (le solide (3) est l'armature interne du cardan) ; enfin le solide (4) est lié au solide (3) par une articulation rotoïde d'axe Oz4 orthogonal à On. Ainsi le solide (4) se trouve avoir un point fixé O dans son mouvement par rapport au bâti (1).
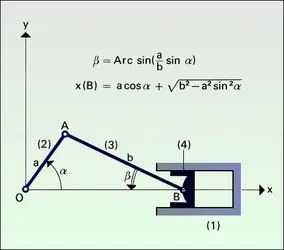
Bielle / manivelle
Encyclopædia Universalis France
Dans le système bielle-manivelle, on distingue le bâti (1), la manivelle (2), la bielle (3), le piston (4) (fig. 8). La manivelle est liée au bâti par une articulation rotoïde d'axe Oz (perpendiculaire au plan de la figure), la bielle est liée à la manivelle par une articulation rotoïde d'axe Az (son mouvement par rapport au bâti est un mouvement plan[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Médias
Solide invariable
Encyclopædia Universalis France

Représentation cylindro-polaire
Encyclopædia Universalis France
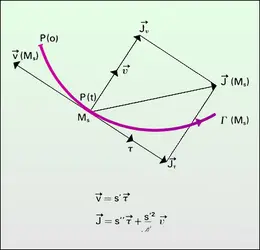
Accélération tangentielle
Encyclopædia Universalis France
Autres références
-
EINSTEIN ALBERT (1879-1955)
- Écrit par Michel PATY
- 6 494 mots
- 7 médias
 ...durées dans le système considéré au repos par rapport à ces grandeurs définies dans le système en mouvement :Ce sont des propriétés physiques de nature cinématique. Il déduisit également la nouvelle formule relativiste d'addition des vitesses :
...durées dans le système considéré au repos par rapport à ces grandeurs définies dans le système en mouvement :Ce sont des propriétés physiques de nature cinématique. Il déduisit également la nouvelle formule relativiste d'addition des vitesses : pour des vitesses colinéaires v et w), qui gouverne...
pour des vitesses colinéaires v et w), qui gouverne...
-
ENGRENAGES
- Écrit par Michel CAZIN et Étienne GAIGNEBET
- 2 144 mots
- 9 médias
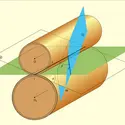 Étant donné un repère de référence que l'on notera (O), repère lié à un bâti, et deux solides S1 et S2 tournant autour d'axes fixes par rapport à (O) : Δ0,1, Δ0,2, on recherche les surfaces de contact Σ1 et Σ2 de S1 et de S2 pour qu'une rotation de S1 entraîne une rotation...
Étant donné un repère de référence que l'on notera (O), repère lié à un bâti, et deux solides S1 et S2 tournant autour d'axes fixes par rapport à (O) : Δ0,1, Δ0,2, on recherche les surfaces de contact Σ1 et Σ2 de S1 et de S2 pour qu'une rotation de S1 entraîne une rotation... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS , Claude FRANÇOIS et Bernard LE FUR
- 8 797 mots
- 4 médias
 Imaginons à l'intérieur d'un fluide une surface fermée entourant un point M, à l'intérieur de laquelle se trouvent, à un instant donné t, un certain nombre de molécules dont le centre d'inertie se déplace avec une certaine vitesse. Lorsque les dimensions de la surface tendent...
Imaginons à l'intérieur d'un fluide une surface fermée entourant un point M, à l'intérieur de laquelle se trouvent, à un instant donné t, un certain nombre de molécules dont le centre d'inertie se déplace avec une certaine vitesse. Lorsque les dimensions de la surface tendent... -
FORME
- Écrit par Jean PETITOT
- 27 352 mots
...le mouvement qui en est le phénomène. La mécanique doit se restreindre à la légalisation catégoriale et à la détermination mathématique de ce phénomène. Kant développe alors une lecture transcendantale d'abord de la cinématique (le groupe de la relativité galiléenne) et ensuite de la mécanique... - Afficher les 13 références
