
- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
DYNAMIQUE
Mouvement relatif
On appelle mouvement relatif tout mouvement d'un système matériel repéré par rapport à un repère quelconque (λ) non galiléen. Les théorèmes de la mécanique en mouvement relatif se déduisent du principe fondamental, compte tenu de la formule de composition des accélérations qui permet d'écrire :

Quand il n'y a pas de confusion possible, on note simplement ces torseurs {Ae} et {AC}.
Théorèmes généraux
Il vient immédiatement :
On donne en général le nom de torseurs des forces d'inertie d'entraînement {FΣ,e(λ,g)} et complémentaires {FΣ,C(λ,g)} aux opposés des torseurs {AΣ,e(λ,g)} et {AΣ,C(λ,g)}.
La loi fondamentale donne alors :
D'où les théorèmes généraux en mouvement relatif :
Pour tout ensemble matériel en mouvement par rapport à un repère quelconque, la quantité d'accélération de son centre d'inertie est égale à la somme du torseur des efforts extérieurs s'exerçant sur Σ, augmentée des sommes du torseur des forces d'inertie d'entraînement et du torseur des forces d'inertie complémentaires dues au mouvement de λ par rapport au galiléen.
Pour tout ensemble matériel Σ en mouvement par rapport à un repère λ quelconque, le moment dynamique en un point I quelconque est égal au moment, au même point I, du torseur des efforts extérieurs s'exerçant sur Σ augmenté des moments en I du torseur des forces d'inertie d'entraînement et du torseur des forces d'inertie complémentaires dues au mouvement de λ par rapport au galiléen.
Théorème de l'énergie-puissance
Dans le cas du solide unique, on prend comme torseur {W} le torseur {λS} ; on obtient donc :
Théorème. – Pour un solide unique S en mouvement par rapport à un repère λ quelconque, la dérivée par rapport au temps de l'énergie cinétique est égale à la puissance dans λ du torseur des efforts extérieurs s'exerçant sur S augmentée de la puissance dans λ des forces d'inertie d'entraînement dues au mouvement de λ par rapport à g.
Pour un ensemble fini de solides, on a, comme précédemment, par sommation,
Théorème. – Pour un ensemble fini de solides ΣSj en mouvement par rapport à un repère quelconque λ, la dérivée par rapport au temps de l'énergie cinétique est égale à la puissance dans λ des efforts extérieurs à ΣSj et des interefforts entre les Si augmentée de la puissance dans λ des forces d'inertie d'entraînement dues au mouvement de λ par rapport au galiléen.
Équations de Lagrange
Pour un solide unique, on choisit pour torseur {W} le torseur {λS,i} ; il vient, compte tenu des résultats précédents et en prenant :
Pour un ensemble fini de solides, on a donc :
Pour le théorème de l'énergie-puissance en mouvement relatif, on a vu que l'accélération de Coriolis n'intervenait pas. Au contraire, le coefficient énergétique relatif aux forces d'inertie de Coriolis n'est en général pas nul lorsque l'on forme les équations de Lagrange en mouvement relatif pour un ensemble de solides.
En résumé, on peut dire que le principe fondamental (et, par suite, toutes ses conséquences) est encore valable pour le mouvement d'un ensemble matériel par rapport à un repère quelconque, à condition d'ajouter au torseur des forces extérieures s'exerçant sur l'ensemble matériel considéré le torseur des forces d'inertie d'entraînement et le torseur des forces d'inertie complémentaire.
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Médias
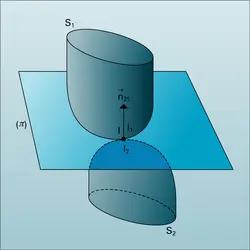
Solides en contact ponctuel
Encyclopædia Universalis France
Liaison rotoïde
Encyclopædia Universalis France
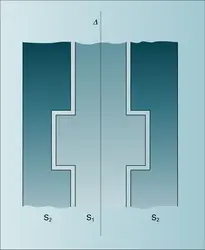
Liaison verrou
Encyclopædia Universalis France
Autres références
-
ALEMBERT JEAN LE ROND D' (1717-1783)
- Écrit par Michel PATY
- 2 876 mots
- 2 médias
 Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de...
Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
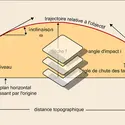 Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre...
Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
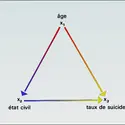 Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique...
Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS , Claude FRANÇOIS et Bernard LE FUR
- 8 797 mots
- 4 médias
 Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
- Afficher les 20 références
