
- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
DYNAMIQUE
Équilibres absolus et relatifs
On dit qu'un ensemble matériel Σ est en équilibre par rapport à un repère (λ) lorsque tous les paramètres qi repérant la position de Σ par rapport à (λ) restent constants au cours du temps, qi = qi,e étant solution de toutes les équations de mouvement, avec les conditions initiales qi(t0) = qi,e et q′i(t0) = 0.
Puisque les équations générales du mouvement sont :
Dans le cas où il n'y a pas de liaison dépendant du temps (T0 ≡ 0) et où toutes les forces dérivent d'une fonction de forces U, les positions d'équilibre sont solutions des n équations :

Si certains seulement des qi restent constants au cours du temps, il existe un équilibre par rapport à ces paramètres (équilibre relatif), mais il n'y a pas de position d'équilibre pour le système.
Stabilité d'un équilibre
Par définition, on dit qu'une valeur qi,e d'équilibre pour un paramètre qi est stable si, et seulement si, quels que soient ε > 0 et ε′ > 0 suffisamment petits :

Une position d'équilibre d'un ensemble matériel Σ par rapport à un repère (λ) sera dite stable si, et seulement si, il y a stabilité par rapport à tous les paramètres.
Pratiquement, une position d'équilibre instable ne pourra jamais être mise en évidence, d'où l'importance de savoir reconnaître la stabilité d'une position d'équilibre.
Dans le cas où toutes les forces dérivent d'une fonction de forces indépendantes du temps, où il n'y a pas de liaison dépendant du temps et où la fonction de forces U dépend de tous les paramètres qi, on a vu que les valeurs des qi,e sont celles qui rendent U extremum. On est assuré de la stabilité de l'équilibre (théorème de Lejeune-Dirichlet) si cet extremum est un maximum (maximum relatif strict).
Dans le cas général, on linéarise les équations du mouvement au voisinage de la position d'équilibre considérée, puis on étudie la stabilité du système linéarisé, d'où l'on déduit la stabilité de la position d'équilibre.
Technique de linéarisation
Les équations de mouvement d'un système mécanique, à n degrés de liberté, sont de la forme :

La position d'équilibre peut toujours être obtenue pour q1 = q2 = ... = qn = 0 ou en faisant un changement de variables.
La position d'équilibre correspond à fi(0, 0) = 0.
Le système linéarisé au voisinage de la position d'équilibre q = 0 est, par définition, le système des n équations différentielles, linéaires, du second ordre, à coefficients constants :


Équation caractéristique et stabilité
D'après la théorie des équations différentielles, le système linéarisé précédent possède des solutions particulières de la forme qj = Aj exp st où s et les Aj sont inconnus. Si ces valeurs des qj sont reportées dans le système linéarisé, celui-ci se présente comme un système de n équations du premier degré par rapport aux n inconnues Aj. Ce système n'admet de solution autre que zéro, pour tous les Aj, que si le déterminant des coefficients est nul :


Une condition nécessaire de stabilité[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Médias
Solides en contact ponctuel
Encyclopædia Universalis France
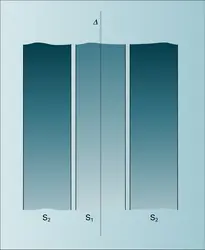
Liaison rotoïde
Encyclopædia Universalis France
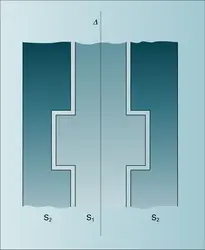
Liaison verrou
Encyclopædia Universalis France
Autres références
-
ALEMBERT JEAN LE ROND D' (1717-1783)
- Écrit par Michel PATY
- 2 876 mots
- 2 médias
 Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de...
Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
 Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre...
Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
 Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique...
Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS , Claude FRANÇOIS et Bernard LE FUR
- 8 797 mots
- 4 médias
 Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
- Afficher les 20 références
