- 1. Sur quelques propriétés de l'espace euclidien
- 2. Remarques sur les courbes et les surfaces
- 3. Arcs paramétrés et trajectoires
- 4. Courbes régulières
- 5. Définition des surfaces
- 6. Formes fondamentales sur une surface
- 7. Courbes tracées sur une surface
- 8. Propriétés globales liées à la courbure totale
- 9. Bibliographie
GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE
Article modifié le
Définition des surfaces
Surfaces régulières
On appellera surface régulière de classe Ck, k ≥ 1, de l'espace euclidien E3 un sous-ensemble S ⊂ E3 possédant la propriété suivante : Tout point de S est centre d'une boule ouverte B de E3 telle qu'il existe une application ϕ de classe Ck d'un ouvert U de R2 dans E3 :


Changement de paramètre pour une surface
Encyclopædia Universalis France
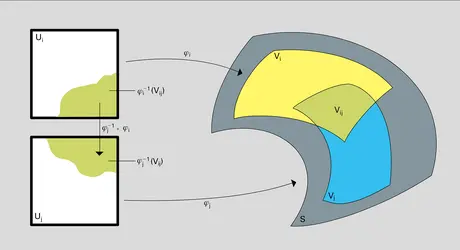
L'application ϕ est appelée une représentation paramétrique vraie, ou régulière, de V = S ∩ B. Il résulte alors du théorème des fonctions implicites qu'au voisinage de chaque point de S on peut exprimer l'une des coordonnées comme fonction de classe Ck des deux autres, l'application ainsi définie étant de rang 2. Si (ϕi, Ui) et (ϕj, Uj) sont deux représentations paramétriques telles que Vij = ϕi(Ui) ∩ ϕj(Uj) ne soit pas vide, le changement de paramètre ϕj-1 ∘ ϕi est un difféomorphisme de classe Ck de ϕi-1(Vij) sur ϕj-1(Vij). Ces considérations conduisent directement à la notion de variété différentiable générale.
Par exemple, pour la sphère S de centre O et de rayon 1, la représentation paramétrique :


En utilisant le fait que S est compacte (fermée et bornée dans R3), on peut montrer qu'il n'existe aucune représentation paramétrique régulière de la sphère tout entière.
De manière générale, soit f une fonction numérique de classe Ck définie dans E3 ; si a ∈ f (E3) est tel que f soit de rang 1 (c'est-à-dire que sa différentielle ne s'annule pas) en tout point de f-1(a), alors le théorème des fonctions implicites entraîne que l'ensemble f -1(a) est une surface régulière. Par exemple, la sphère est définie par l'équation :

S'il existe des points de f-1(a) où la différentielle s'annule, on dit que f-1(a) est une surface avec singularités ; par exemple le cône x2 + y2 − z2 = 0, vu au chapitre 2, a l'origine pour point singulier (sommet du cône).

Position d'un surface par rapport à un plan tangent
Encyclopædia Universalis France
Comme exemples importants de surfaces régulières, on a notamment les quadriques (à l'exclusion du cône) définies par une équation :




On dit qu'une surface S est réglée si par tout point de S passe au moins une droite entièrement contenue dans S ; une telle droite est appelée une génératrice de la surface. Par exemple, l'hyperboloïde à une nappe et le paraboloïde hyperbolique sont engendrés par deux familles à un paramètre de droites : par chaque point passe une génératrice de chaque famille.

Intersection du tore avec son plan tangent
Encyclopædia Universalis France
Parmi les autres surfaces d'un type particulier, notons les surfaces de révolution : une surface S (régulière ou avec singularités) est dite de révolution autour d'un axe D si toute rotation d'axe D transforme S en elle-même. Ainsi, si M est un point de S qui n'appartient pas à D, le cercle d'axe D passant par M est entièrement situé dans S ; on dit qu'un tel cercle est un parallèle de la surface. De même, on appelle méridien les intersections de S avec les plans passant par D ; bien entendu, la terminologie précédente généralise celle adoptée traditionnellement pour la sphère qui est de révolution autour de tout axe passant par son centre. Par exemple, pour a = b, l'hyperboloïde à une nappe est de révolution autour de l'axe Oz ; c'est la surface engendrée par la rotation d'une droite autour d'un axe non coplanaire et les méridiens sont des hyperboles. Le tore est défini par la rotation d'un cercle autour d'une droite de son plan ne le rencontrant pas. Il admet la représentation paramétrique (non régulière, parce que non bijective) :

Plan tangent
Soit M un point d'une surface régulière (ou un point régulier d'une surface avec singularités). Si (ϕ, U) est une représentation paramétrique régulière au voisinage de M, l'image de R2 par l'application affine TMϕ tangente à ϕ au point m = ϕ-1(M) (cf. chap. 1) est indépendante du choix de la représentation paramétrique régulière : cette image est le plan, passant par M, engendré par les vecteurs :


Si la surface est réglée, toute génératrice passant par M appartient au plan tangent ; en particulier, s'il passe par M deux génératrices distinctes, elles engendrent le plan tangent : c'est ce qui se produit pour l'hyperboloïde à une nappe et pour le paraboloïde hyperbolique. Dans le cas particulier où le plan tangent est le même tout le long de chaque génératrice, on dit qu'on a une surface réglée développable.
Examinons les différentes surfaces réglées développables. Si toutes les génératrices passent par un point fixe, on a un cône ; si elles sont parallèles à une direction fixe, on a un cylindre. Un autre exemple très important s'obtient à partir des tangentes à une courbe : l'ensemble des tangentes à une courbe régulière engendre une surface développable. On peut montrer que la surface développable la plus générale est formée de nappes de surfaces coniques, cylindriques et de tangentes à des courbes gauches, ces nappes étant attachées les unes aux autres le long d'une génératrice (deux nappes se « recollant » le long d'une génératrice ont même plan tangent).
Position par rapport au plan tangent
Au voisinage d'un point M0(x0, y0, z0) régulier d'une surface S, on peut exprimer une des coordonnées en fonction des deux autres, par exemple z = g(x, y). Le plan tangent en M0 est alors défini par :




Points plats
Encyclopædia Universalis France
Si la forme quadratique associée à la différentielle seconde de g :

Si la forme quadratique Q est non nulle, on distingue trois cas :
a) Si rt − s2 > 0, la forme Q est définie positive ou négative. Au voisinage de M0, l'intersection de S et du plan tangent en M0 se réduit à M0 et la surface reste d'un même côté de ce plan tangent (elle est localement convexe). C'est le cas de tous les points d'un ellipsoïde. On dit que le point M0 est elliptique.
b) Si rt − s2 < 0, la surface traverse son plan tangent au voisinage de M0. C'est le cas de tout point d'un hyperboloïde à une nappe ou d'un paraboloïde hyperbolique. On dit que le point est hyperbolique.
c) Si rt − s2 = 0, on ne peut rien dire de général. Même si la surface reste localement d'un même côté du plan tangent (point parabolique), l'intersection ne se réduit pas nécessairement à un point. C'est le cas de tout point d'un cylindre elliptique ou parabolique ; l'intersection avec un plan tangent est ici une génératrice.
Une même surface peut présenter des points de nature différente. Par exemple, le tore, dont on a donné une représentation paramétrique ci-dessus, admet des points elliptiques (tels que x2 + y2 > 1), des points hyperboliques (tels que x2 + y2 < 1 ; ) et des points paraboliques (tels que x2 + y2 = 1). L'ensemble des points paraboliques est constitué de deux parallèles au tore, le plus « haut » et le plus « bas », et en un tel point de plan tangent touche le tore tout le long du parallèle correspondant.
Accédez à l'intégralité de nos articles
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Paulette LIBERMANN : professeur à l'université de Paris-VII
Classification
Médias

Trèfle à quatre feuilles
Encyclopædia Universalis France
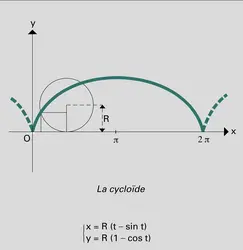
Cycloïde
Encyclopædia Universalis France

Position d'une courbe par rapport à sa tangente
Encyclopædia Universalis France
Autres références
-
ANALYSE MATHÉMATIQUE
- Écrit par Jean DIEUDONNÉ
- 8 532 mots
Unedes origines du calcul infinitésimal avait été l'étude des courbes planes (tangente, courbure, rectification, etc.), et un de ses succès au xviiie siècle fut l'étude analogue des courbes gauches et des surfaces. Mais les résultats obtenus étaient relatifs à la position de la courbe ou surface...
Voir aussi
- TORE
- ACCÉLÉRATION
- VITESSE
- CÔNE
- HYPERBOLOÏDE
- PARABOLOÏDE
- SPHÈRE
- GÉOMÉTRIE DIFFÉRENTIELLE
- EULER-POINCARÉ CARACTÉRISTIQUE D'
- LONGUEUR, mathématiques
- SURFACES DE RÉVOLUTION
- PLAN TANGENT
- POINT DE REBROUSSEMENT
- TORSION, mathématiques
- TANGENTE À UNE COURBE
- PLAN OSCULATEUR
- POINT SINGULIER
- REPÈRE MOBILE
- POINT RÉGULIER
- ESPACE EUCLIDIEN
- CERCLE, mathématiques
- ARC PARAMÉTRÉ
- CYCLOÏDE
- COURBURE, mathématiques
- COURBES RÉGULIÈRES
- DARBOUX TRIÈDRE DE
- FRÉNET TRIÈDRE DE
- FORMES FONDAMENTALES SUR UNE SURFACE
- GÉODÉSIQUES
- POINT D'INFLEXION
- INVERSION, mathématiques
- LACET, mathématiques
- TRAJECTOIRE, mathématiques
- DIFFÉRENTIELLE
- FONCTIONS IMPLICITES THÉORÈME DES
- ISOMÉTRIE, mathématiques
- GAUSS-BONNET FORMULE DE
- DÉRIVÉE COVARIANTE
- SURFACE RÉGLÉE
- REPRÉSENTATION PARAMÉTRIQUE
