GROUPES (mathématiques) Groupes classiques et géométrie
Article modifié le
Généralisations
Les groupes GL(E) et SL(E) se définissent de la même manière lorsque E est un espace vectoriel de dimension finie sur un corps commutatif K quelconque ; si n = dim E, on note aussi ces groupes GL(n, K) et SL(n, K). Tout ce qui a été vu dans le chapitre 1 pour le cas K = R s'étend sans changement au cas général, sauf en ce qui concerne la détermination des involutions lorsque K est de caractéristique 2 et, en ce qui concerne les propriétés de conjugaison, lorsque dim E = 2. On peut toutefois montrer que SL(E) est encore son propre groupe des commutateurs sauf lorsque dim E = 2 et que K est un corps fini ayant deux ou trois éléments ; la démonstration de simplicité faite plus haut dans le chapitre 1 s'applique alors sans modification et prouve que SL(E)/(Z ∩ SL(E)) est un groupe simple, sauf dans les deux cas précédents.
On peut étendre la définition de GL(E) et de SL(E) au cas où E est un espace vectoriel (à gauche) de dimension finie sur un corps K non commutatif, mais il faut utiliser dans ce cas une autre définition du déterminant ; moyennant quoi, on peut encore prouver la simplicité du groupe SL(E)/(Z ∩ SL(E)) ; le centre Z(E) de GL(E) est ici formé des homothéties x ↦ λx où λ ≠ 0 est dans le centre de K.

La définition de GL(E) est aussi valable pour un module (à gauche) E sur un anneau quelconque A ; mais, ici, la structure de ce groupe dépend de façon essentielle de la structure de l'anneau A, et on ne connaît de résultats satisfaisants que dans un petit nombre de cas particuliers.
La notion de groupe orthogonal O(Φ) se généralise aussi au cas où E est un espace vectoriel de dimension finie sur un corps commutatif K, que nous supposerons en outre de caractéristique ≠ 2 (la caractéristique 2 introduit ici des phénomènes spéciaux) ; Φ est une forme bilinéaire symétrique non dégénérée sur E. Il faut remarquer d'abord qu'il y a toujours ici des bases orthogonales (ej) de E pour la forme Φ, c'est-à-dire Φ(ei, ej) = 0 pour i ≠ j ; mais, si l'on pose Φ(ei, ei) = αi, il n'est pas possible en général d'obtenir une base orthogonale pour laquelle αi = ± 1 pour tout i ; la notion de signature de Φ n'a pas de sens lorsque K n'est pas un corps ordonné. Par contre, la définition des vecteurs et sous-espaces isotropes subsiste sans modification ; on appelle encore indice de Witt de Φ la dimension maximale v des sous-espaces totalement isotropes, et on a 2 v ≤ n. Il faut noter que, lorsque K est algébriquement clos (par exemple K = C), on a toujours v = [n/2], partie entière de n/2 ; si K est fini, on a v = [n/2] pour n impair, v = n/2 ou n/2 − 1 si n est pair.
Tout ce qui a été dit dans le chapitre 3 sur les involutions de O(Φ) subsiste sans changement dans le cas général. Les questions de transitivité sont résolues par le théorème de Witt : Soit deux sous-espaces vectoriels V1 et V2 de même dimension dans E, pour qu'il existe une transformation u ∈ O(Φ) telle que u(V1) = V2, il faut et il suffit que les restrictions de Φ à V1 et à V2 soient des formes équivalentes (dégénérées ou non). On peut encore alors transformer V1 en V2 par une rotation, sauf dans le même cas d'exception que pour K = R (cf. Propriétés de transitivité, in chap. 3).
Le groupe O+(Φ) est encore commutatif pour n = 2 ; il est formé des matrices :

Il n'y a rien d'analogue en général à la prétendue « mesure » des angles ; autrement dit, il n'existe pas en général d'homomorphisme du groupe additif de K sur le groupe des rotations O+(Φ).
Lorsque n ≥ 3, il faut distinguer, dans l'étude de la structure du groupe O+(Φ), le cas v ≥ 1 et le cas v = 0.
Pour v ≥ 1 (autrement dit, lorsqu'il existe des vecteurs isotropes ≠ 0), on considère le groupe Ω(Φ) ⊂ O+(Φ) des commutateurs de O(Φ). Le quotient O+(Φ)/Ω(Φ) est isomorphe à K*/K*2, en désignant par K*2 le groupe des carrés des éléments ≠ 0 de K ; si n est pair, le groupe Ω(Φ) ∩ Z0 est égal à Z0 si et seulement si le discriminant de Φ est un carré dans K. Le groupe :



Le cas v = 0 (absence de vecteurs isotropes ≠ 0) est tout à fait différent, et la structure de O(Φ) dépend essentiellement du corps de base K. Prenons par exemple n = 3 et, pour Φ, le produit scalaire usuel :




Cela étant, pour tout entier r ≥ 1, soit G, le sous-groupe de O(Φ) formé des matrices de la forme I + 2rV, où V est une matrice à coefficients rationnels dont les dénominateurs ne sont pas divisibles par 2. Pour toute matrice U ∈ O(Φ), on a alors :


Si K = Q, le phénomène précédent ne peut se produire que pour les dimensions 3 et 4 ; mais on peut, pour toute valeur de n, donner des exemples de corps K et de forme Φ pour lequel on a une suite infinie décroissante de sous-groupes distingués de O(Φ).
Accédez à l'intégralité de nos articles
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Jean DIEUDONNÉ : membre de l'Académie des sciences
Classification
Médias
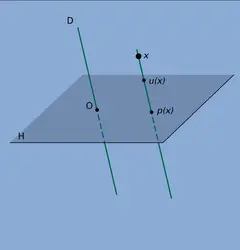
Dilatation
Encyclopædia Universalis France
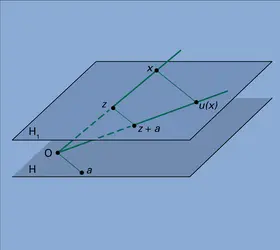
Transvection
Encyclopædia Universalis France
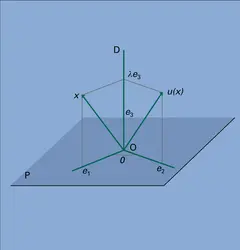
Simplicité du groupe O+
Encyclopædia Universalis France
Autres références
-
ALGÈBRE
- Écrit par Jean-Luc VERLEY
- 7 145 mots
La structure de groupe est une des structures algébriques les plus simples et, sans conteste, la plus importante des mathématiques modernes. Son universalité ne s'arrête pas là : le psychologue Piaget a mis en évidence le rôle essentiel joué par cette notion dans les mécanismes mêmes de la pensée, et... -
BOREL ARMAND (1923-2003)
- Écrit par Pierre CARTIER
- 795 mots
En 1992, le mathématicien Armand Borel a reçu le prix international Balzan « pour ses contributions fondamentales à la théorie des groupes de Lie, des groupes algébriques et des groupes arithmétiques, et pour son action inlassable en faveur de la recherche mathématique et de la propagation...
-
BURNSIDE WILLIAM SNOW (1852-1927)
- Écrit par Bernard PIRE
- 394 mots
Mathématicien britannique, spécialiste de la théorie des groupes. Né le 2 juillet 1852 à Londres (Grande-Bretagne) d'un père écossais, William Snow Burnside fait ses études supérieures au Pembroke College de l'université de Cambridge, dont il est diplômé en 1875 et où il effectue ses recherches...
-
CAUCHY AUGUSTIN-LOUIS (1789-1857)
- Écrit par Jean DIEUDONNÉ
- 1 402 mots
- 1 média
...valeurs propres d'une matrice symétrique d'ordre supérieur à 3, et il partage avec Binet la découverte de la formule donnant le produit de deux déterminants. Il a été aussi le premier à dégager clairement la notion de groupe de permutations et on lui doit les premiers résultats non triviaux de la théorie des... - Afficher les 34 références
Voir aussi
- GROUPE SIMPLE
- COSINUS
- TRIGONOMÉTRIE
- SINUS, mathématiques
- CENTRALISATEUR, mathématiques
- COMMUTATEUR, mathématiques
- GROUPE LINÉAIRE GÉNÉRAL
- HYPERPLAN
- NOMBRES RATIONNELS
- ERLANGEN PROGRAMME D'
- INVOLUTION, mathématiques
- GÉOMÉTRIES NON EUCLIDIENNES
- TRANSFORMATIONS GÉOMÉTRIQUES
- PRODUIT SCALAIRE
- HOMOTHÉTIE
- TRIGONOMÉTRIE HYPERBOLIQUE
- ESPACE EUCLIDIEN
- SPINEUR
- GROUPE SYMPLECTIQUE
- GROUPE UNITAIRE
- TRANSITIVITÉ
- ISOTROPE, mathématiques
- WITT INDICE DE
- GROUPE ORTHOGONAL
- ORTHOGONALITÉ
- BASE ORTHONORMALE
- ISOMÉTRIE, mathématiques
- GROUPE UNIMODULAIRE ou GROUPE LINÉAIRE SPÉCIAL
- TRANSVECTION
- ANGLE
- GÉOMÉTRIE ELLIPTIQUE
- RÉFLEXION, mathématiques
- SIMILITUDE, mathématiques
- GROUPE DE TRANSFORMATIONS
- GROUPE SPÉCIAL UNITAIRE
- ROTATION, mathématiques
