
MACHINES-OUTILS
Article modifié le
Techniques récentes d'usinage
On a vu que, dans de nombreux cas, l'universalité et l'automatisme semblaient difficilement conciliables. Les recherches des constructeurs, au cours des dernières décennies, ont eu parmi leurs principaux objectifs celui de surmonter cette incompatibilité.
La commande numérique
L'irruption de l'informatique dans la machine-outil, qui a donné naissance aux machines à commande numérique, a entraîné un profond bouleversement de leur conception, aussi bien mécanique qu'électrique, les machines traditionnelles s'adaptant difficilement à cette nouvelle technique et ne permettant pas d'en exploiter toutes les possibilités. Une machine-outil à commande numérique est capable de se commander elle-même et de mesurer avec une extrême précision les déplacements de ses organes mobiles, porte-pièces ou porte-outils. Cet automatisme est rendu possible par un système informatique gardant en mémoire la description précise des différentes opérations à effectuer sur une pièce, qui constituent le programme. Il existe donc un travail préalable de programmation, qui consiste à décrire les opérations prévues dans un langage codé assimilable par un ordinateur ou un micro-ordinateur ; cette programmation, manuelle lorsque les opérations sont simples, peut elle-même être partiellement ou totalement automatisée grâce à des dispositifs d'aide à la programmation permettant d'enregistrer au préalable, une fois pour toutes, certaines « macro-instructions », afin de réduire au minimum les instructions spécifiques à chaque cas particulier.
La description du programme sous la forme d'instructions codées utilisables par la machine à commande numérique peut être matérialisée sur un support, tel qu'une bande magnétique, la machine devant alors comporter un lecteur de bande, ou être conservée en mémoire dans le micro-ordinateur qui commande directement la machine.
Ce micro-ordinateur offre des avantages supplémentaires, en évitant par exemple les incidents dus à une détérioration de la bande magnétique. On peut ainsi n'utiliser cette bande qu'une seule fois pour enregistrer le programme dans le micro-ordinateur et adopter ensuite la commande directe pour l'exécution de la série de pièces. De plus, si ce programme doit pour une raison quelconque être modifié, on peut, sans refaire toute la bande, se contenter d'enregistrer la modification dans le micro-ordinateur qui est d'ailleurs capable, s'il possède le système convenable et s'il s'agit d'une modification définitive, d'élaborer automatiquement une nouvelle bande mise à jour.
Les équipements de commande numérique se caractérisent par le nombre d'« axes », c'est-à-dire de mouvements, qu'ils permettent de contrôler, successivement ou simultanément.
Dans le cas de contrôle successif des mouvements, les trajectoires obtenues ne peuvent être qu'une suite de déplacements rectilignes parallèles aux axes de la machine. Cette solution, valable pour les travaux de perçage et certaines opérations d'alésage, permet de réaliser deux types d'usinage : le positionnement point à point et l'usinage paraxial. Le contrôle simultané de plusieurs mouvements est nécessaire pour réaliser avec précision une trajectoire curviligne quelconque dans le plan (contrôle de deux axes) ou dans l'espace (contrôle de trois axes). La commande numérique comporte alors des dispositifs d'interpolation automatique linéaire (pour obtenir une trajectoire rectiligne inclinée par rapport aux axes) et circulaire. L'axe sous contrôle de la commande numérique peut correspondre à un mouvement de translation ou un mouvement de rotation. Il faut alors prévoir une interpolation polaire, qui permet par exemple de réaliser l'usinage d'une came sur un tour, les deux mouvements contrôlés étant la rotation de la broche, sur laquelle est[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- René LE BRUSQUE : diplômé du Conservatoire national des arts et métiers, ancien ingénieur en chef de la Société H. Ernault-Somua (Recherche et développement)
- Jean-Paul MATHIEU : ancien élève de l'École polytechnique, secrétaire général de la société Ernault Toyota-Automation
Classification
Médias
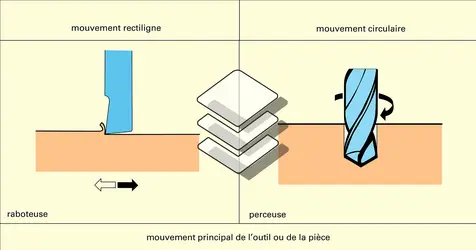
Types et mode d'action
Encyclopædia Universalis France

Origines et évolution de la machine-outil
Encyclopædia Universalis France

Manufacture d'armes, XIXe siècle
Hulton Archive/ Getty Images
Autres références
-
ABRASION USINAGE PAR
- Écrit par Jean-Marie NOPPE
- 786 mots
L'usinage par abrasion est un usinage par enlèvement de matériau sous forme de copeaux minuscules arrachés par les arêtes vives d'un grand nombre de grains abrasifs. L'usinage par abrasion est une technique très ancienne, qui a précédé l'usinage par outils de coupe. Bien que le travail...
-
AUTOMATISATION
- Écrit par Jean VAN DEN BROEK D'OBRENAN
- 11 885 mots
- 12 médias
 Ces curieuses tentatives ouvrirent la voie au perfectionnement desmachines-outils dans le textile, dans l'imprimerie, puis dans les industries mécaniques, contraintes de fabriquer des armements en grande série pendant la Première Guerre mondiale. Ces progrès permirent, dès l'après-guerre, de développer...
Ces curieuses tentatives ouvrirent la voie au perfectionnement desmachines-outils dans le textile, dans l'imprimerie, puis dans les industries mécaniques, contraintes de fabriquer des armements en grande série pendant la Première Guerre mondiale. Ces progrès permirent, dès l'après-guerre, de développer... -
BRAMAH JOSEPH (1748-1814)
- Écrit par Bruno JACOMY
- 455 mots
- 1 média
Joseph Bramah est l'un des mécaniciens anglais les plus remarquables du tournant du xixe siècle, tant pour ses propres inventions que pour celles des ingénieurs qui, passés par son atelier, ont bâti l'industrie de la machine-outil britannique.
Ébéniste de formation, Joseph Bramah,...
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 291 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
- Afficher les 8 références
Voir aussi
- MÉCANIQUES FABRICATIONS
- VAUCANSON JACQUES DE (1709-1782)
- MÉCANIQUES INDUSTRIES
- MACHINE À VAPEUR
- DÉFORMATIONS, mécanique
- ÉLECTROLYTIQUE USINAGE
- COMMANDE NUMÉRIQUE
- FLUOTOURNAGE
- PRÉCISION
- MACHINE-TRANSFERT
- MAUDSLAY HENRY (1771-1831)
- NASMYTH JAMES (1808-1890)
- MULTIBROCHE TOUR
- TOUR, technologie
- ALÉSEUSE
- WILKINSON JOHN (1728-1808)
- WHITWORTH JOSEPH (1803-1887)
- ENLÈVEMENT DE MATIÈRE
- PARALLÈLE TOUR
- ÉLECTRO-ÉROSION
- BROCHEUSE
- REVOLVER TOUR
- AUTOMATIQUE TOUR
- FRAISEUSE
- CLÉMENT JOSEPH (1779-1844)
- USINAGE
- HISTOIRE ÉCONOMIQUE
