
MÉCANIQUE Liaisons mécaniques
Les réalisations mécaniques peuvent se classer en deux groupes principaux. D'une part, on trouve les constructions dans lesquelles les différents organes constitutifs n'ont pas de déplacement relatif les uns par rapport aux autres, si l'on néglige les déplacements très petits dus aux déformations élastiques ou élastoplastiques ; on a, d'autre part, les mécanismes dans lesquels le mouvement relatif des différentes pièces ou organes permet à l'objet fabriqué de remplir le rôle pour lequel il a été conçu.
Le premier groupe est constitué par les constructions de génie civil (charpentes métalliques, ponts, constructions en béton, pylônes, réservoirs pour gaz et liquides...) ; le second groupe comprend toutes les machines : machines génératrices ou transformatrices de l'énergie (alternateurs, moteurs électriques, turbines hydrauliques, à gaz, à vapeur, moteurs à combustion interne, turboréacteurs...), machines instruments (machines-outils, machines agricoles, appareils de levage et de manutention, pompes, métiers à tisser, machines à coudre...).
Les constructions du premier groupe nécessitent essentiellement la connaissance des lois de la statique du corps solide, de la résistance des matériaux et de la stabilité. La construction des mécanismes ou des machines demande, en outre, la connaissance des lois de l'énergétique, de la dynamique des solides et des fluides, de l'aptitude des matériaux à résister aux efforts variables ; les problèmes de frottement, d'usure, de corrosion ont une grande influence ; la fiabilité de la construction et l'évaluation, au stade du projet, de la durée de vie compatible avec un fonctionnement correct sont des nécessités impératives.
Quel que soit le type de construction, des considérations techniques de fabrication économique, de montage, de transport imposent souvent le fractionnement d'un organe en plusieurs pièces, qui, une fois assemblées et liées entre elles, ne peuvent plus se déplacer les unes par rapport aux autres, et se comportent dans leur ensemble comme un solide au sens de la construction considérée.
D'autre part, la transmission du mouvement, de la source d'énergie à l'organe d'utilisation, exige un déplacement relatif bien déterminé de certains organes : les guidages limitent les déplacements relatifs en permettant uniquement les mouvements nécessaires.
Dans le cas le plus général, la situation d'un solide S par rapport à un autre solide T dépend à tout instant de la donnée de six paramètres géométriques. Dans le cas où ces six paramètres varient, en fonction du temps, indépendamment des uns ou des autres, on dit que le mouvement de S par rapport à T est complètement libre. S'il existe entre ces paramètres, leurs dérivées par rapport au temps et le temps l relations, on dit que le mouvement de S par rapport à T est un mouvement à l liaisons mécaniques.
Dans les cas les plus simples de liaisons mécaniques concrètes, il faut exprimer les six paramètres en fonction de k = (6 − l) variables. On dit alors que le nombre de degrés de liberté du solide S par rapport au solide T est égal à k, ou encore que S a k degrés de libertés par rapport à T.
Différents types de liaisons mécaniques
Les liaisons existant entre deux pièces adjacentes peuvent être rigides ou élastiques, complètes ou partielles, démontables ou non démontables.
Une liaison rigide assure aux pièces assemblées une position relative bien déterminée, constante dans le temps, quelles que soient la nature et l'intensité des sollicitations extérieures, dans les conditions normales d'utilisation. Une liaison élastique permet, au contraire, un déplacement relatif limité des pièces assemblées. La position relative des pièces est fonction de l'intensité des sollicitations extérieures. Ce type de liaison permet d'amortir les chocs et de réduire[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Armand GIET : ingénieur des Arts et Métiers, ancien sous-directeur de l'Institut supérieur des matériaux et de la construction mécanique, Saint-Ouen
Classification
Médias
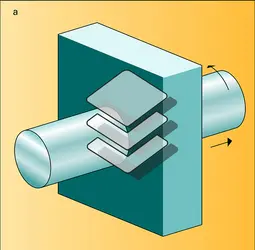
Liaisons incomplètes à un degré de liberté
Encyclopædia Universalis France
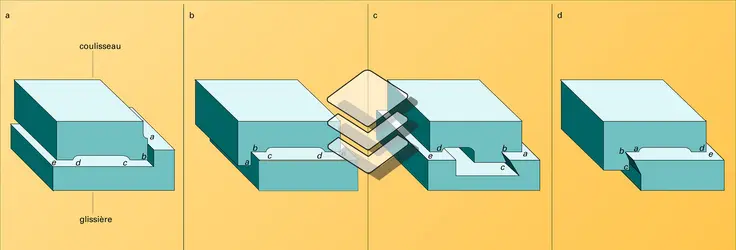
Guidages en translation
Encyclopædia Universalis France
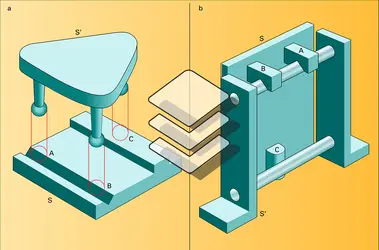
Liaisons partielles et guidages
Encyclopædia Universalis France
Autres références
-
ACTION & RÉACTION, physique
- Écrit par Jean-Marc LÉVY-LEBLOND
- 1 499 mots
...Théodicée de Leibniz, que la physique voit s'imposer une autre notion d'action. À l'origine de cette terminologie donc, la puissance divine. Plus laïquement, Joseph Louis Lagrange (1736-1813) montrera que la mécanique de Newton peut se déduire d'un « principe variationnel ». L'idée en est... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
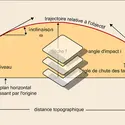 La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile...
La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
 ...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa...
...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa... -
CINÉMATIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 5 548 mots
- 10 médias
La cinématique est la théorie qui, à l'intérieur de la mécanique, a pour objet la description des mouvements des systèmes matériels.
Deux notions sont absolument indispensables à l'élaboration de la cinématique sous sa forme classique : celle de solide invariable et celle de ...
- Afficher les 39 références
