
MÉCANIQUE Liaisons mécaniques
Liaisons partielles et guidages
On ne peut communiquer à un corps quelconque un mouvement déterminé qu'en limitant ses degrés de liberté par d'autres corps. On dit alors qu'il existe, entre les corps, des liaisons partielles. L'assemblage qui permet certaines libertés de mouvement et en empêche d'autres s'appelle guidage.
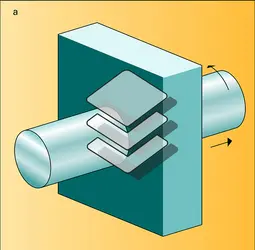
Une barre cylindrique n'ayant aucune liaison avec d'autres corps peut prendre n'importe quel mouvement. Placée dans l'alésage d'un autre corps, elle peut seulement prendre un mouvement de translation rectiligne parallèlement à l'axe x′x et un mouvement de rotation autour de ce même axe. Si cette même barre est munie d'épaulements, elle ne pourra être animée que d'un mouvement de rotation.
Une barre prismatique engagée dans un évidement de même forme ne pourrait accomplir qu'un mouvement de translation.
Le mouvement d'un corps ne pouvant être déterminé que par la limitation de ses degrés de liberté par d'autres corps, il est donc nécessaire d'étudier les formes des surfaces de contact communes qui conditionnent l'aptitude du corps à remplir telle ou telle fonction imposée.
En général, le déplacement relatif d'une pièce mécanique par rapport aux pièces en contact est soit une translation, soit une rotation.
Guidages en translation
Les guidages en translation sont généralement obtenus grâce à des assemblages prismatiques.
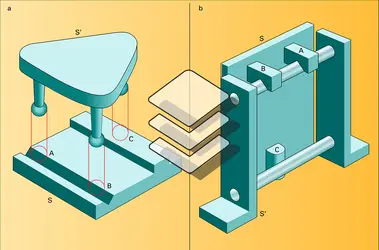
Pour assurer le mouvement de la pièce appelée coulisseau par rapport à la pièce appelée glissière, il faut que la glissière définisse un plan de déplacement et une direction de déplacement dans ce plan.
D'un strict point de vue géométrique, la rainure et l'appui plan, dérivés du dispositif de Kelvin, définissent le guidage rectiligne. Mais il est évident que les réalisations techniques doivent s'écarter beaucoup de cette image, parce que l'étendue des surfaces de contact doit être suffisamment grande pour que les pressions et l'usure soient faibles, sous l'action des efforts appliqués au coulisseau, parce que les contacts doivent être assurés en permanence et parce que la droite définissant la direction du déplacement ne peut être matérialisée que par l'intersection de deux surfaces planes obtenues par l'usinage de la glissière.
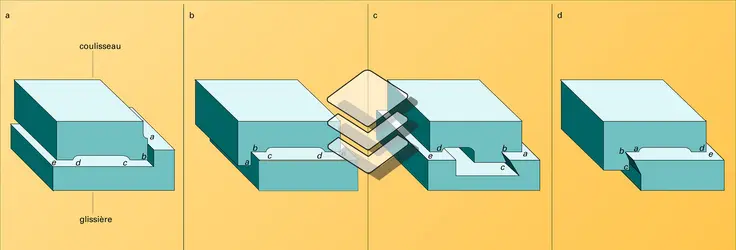
On peut alors imaginer différentes solutions voisines de l'image théorique. Si l'on n'avait pas à se préoccuper du maintien du contact des surfaces conjuguées du coulisseau et de la glissière, les solutions des figures a, b, c, d, e et f pourraient être adoptées. L'arête définissant la direction du déplacement est matérialisée par les plans de traces ab et bc. Le plan de déplacement est le plan de trace de.
Pour empêcher le déplacement fortuit du coulisseau vers la droite ou vers le haut, pour assurer le maintien du contact des surfaces conjuguées, il faut ajouter des contacts supplémentaires comme le montre la figure g qui dérive de la figure 15 a.
Les surfaces de contact qui résultent d'un usinage ne sont jamais des surfaces planes, au sens géométrique du terme. Quelle que soit la qualité de l'usinage, l'état de surface est toujours imparfait et présente toujours un très grand nombre de très petites aspérités. Les surfaces du coulisseau et de la glissière sont alors en contact en un grand nombre de points ou de zones, qui changent d'ailleurs quand le coulisseau se déplace. Du fait de l'imperfection de l'état de surface, un guidage réel possède une grande surabondance d'appuis. De plus, les surfaces auxiliaires nécessaires au maintien du contact des surfaces conjuguées ajoutent encore des appuis surabondants.
Ainsi, les problèmes de guidage sont essentiellement des problèmes d'usinage. Les tolérances de planéité, de rectitude, les tolérances sur les jeux fonctionnels sont très étroites[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Armand GIET : ingénieur des Arts et Métiers, ancien sous-directeur de l'Institut supérieur des matériaux et de la construction mécanique, Saint-Ouen
Classification
Médias
Liaisons incomplètes à un degré de liberté
Encyclopædia Universalis France
Guidages en translation
Encyclopædia Universalis France
Liaisons partielles et guidages
Encyclopædia Universalis France
Autres références
-
ACTION & RÉACTION, physique
- Écrit par Jean-Marc LÉVY-LEBLOND
- 1 499 mots
...Théodicée de Leibniz, que la physique voit s'imposer une autre notion d'action. À l'origine de cette terminologie donc, la puissance divine. Plus laïquement, Joseph Louis Lagrange (1736-1813) montrera que la mécanique de Newton peut se déduire d'un « principe variationnel ». L'idée en est... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
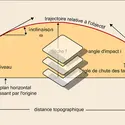 La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile...
La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
 ...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa...
...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa... -
CINÉMATIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 5 548 mots
- 10 médias
La cinématique est la théorie qui, à l'intérieur de la mécanique, a pour objet la description des mouvements des systèmes matériels.
Deux notions sont absolument indispensables à l'élaboration de la cinématique sous sa forme classique : celle de solide invariable et celle de ...
- Afficher les 39 références
