
MÉCANIQUE Mécanique analytique
Article modifié le
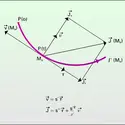
La mécanique analytique représente une approche de la mécanique rationnelle qui s'est développée, à partir des travaux de Maupertuis (1744), dans un certain isolement par rapport aux autres branches de la mécanique et de la physique. Le point de départ en est le « principe de moindre action », qui permet de déterminer le mouvement d'un point matériel dans un champ de forces. Si on considère le mouvement le long d'un arc de trajectoire AB et que l'on évalue l'intégrale curviligne :

(action de Maupertuis), on peut montrer que cette quantité est minimale par rapport à tous les mouvements voisins passant par A et B aux mêmes instants et possédant la même énergie que le mouvement réel. Réciproquement, cette condition d'action minimale permet de déterminer univoquement le mouvement. Elle est donc équivalente à la loi de Newton :

Formalisme lagrangien
Principe des travaux virtuels
On s'intéresse ici à l'étude d'un système dynamiqueclassique, c'est-à-dire d'un assemblage de k points matériels qui peuvent être soumis à des liaisons (exemples : certains points peuvent être astreints à se mouvoir sur une courbe ou une surface donnée ; deux points peuvent être liés de sorte que leur distance reste constante ; etc.).
On numérote les points par un indice j, avec j = 1, 2, ..., k, et l'on désigne par rj la position géométrique du point numéro j, par mj sa masse, par Fj la résultante des forces que l'on exerce sur lui. Les mécanismes assurant les liaisons peuvent exercer par ailleurs une force supplémentaire fj, appelée « force de liaison » ou force « de contact » (exemple : si un point matériel est lié par un fil inextensible à un point fixe, la liaison lui impose de rester sur une sphère ; la force de liaison est mesurée par la tension du fil). Le mouvement du système est alors déterminé par la loi de Newton :

Imaginons, pour chaque point rj, un « déplacement virtuel » infinitésimal δrj, compatible avec les liaisons telles qu'elles existent à l'instant t (exemple : si rj est astreint à se déplacer sur une sphère, δrj est un vecteur quelconque tangent à la sphère) ; il résulte évidemment des équations (1) que l'on a :

(les crochets <,> désignent le produit scalaire ordinaire).
Réciproquement, le système (1) est vérifié si l'égalité (2) est valable quels que soient les déplacements virtuels δrj compatibles avec les liaisons : tel est le résultat découvert par d'Alembert (Traité de dynamique, 1743), que l'on appelle principe des travaux virtuels (parce que le terme écrit à droite de (2) est le travail des forces dans le « déplacement virtuel » défini par les δrj).
Dans le cas où les liaisons sont parfaites (exemples : glissements sans frottement ; liaisons des points à l'intérieur d'un[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Francis HALBWACHS : docteur ès sciences physiques, professeur à l'université de Provence
- Jean-Marie SOURIAU : directeur du Centre de physique théorique de Marseille (C.N.R.S.)
Classification
Média

Espace d'évolution
Encyclopædia Universalis France
Autres références
-
ACTION & RÉACTION, physique
- Écrit par Jean-Marc LÉVY-LEBLOND
- 1 499 mots
...Théodicée de Leibniz, que la physique voit s'imposer une autre notion d'action. À l'origine de cette terminologie donc, la puissance divine. Plus laïquement, Joseph Louis Lagrange (1736-1813) montrera que la mécanique de Newton peut se déduire d'un « principe variationnel ». L'idée en est... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
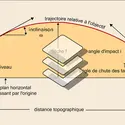 La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile...
La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
 ...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa...
...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa... -
CINÉMATIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 5 548 mots
- 10 médias
La cinématique est la théorie qui, à l'intérieur de la mécanique, a pour objet la description des mouvements des systèmes matériels.
Deux notions sont absolument indispensables à l'élaboration de la cinématique sous sa forme classique : celle de solide invariable et celle de ...
- Afficher les 39 références
Voir aussi
- CHRISTOFFEL SYMBOLES DE
- CHAMP GRAVITATIONNEL
- MOINDRE ACTION PRINCIPE DE
- CONFIGURATION ESPACE DE
- HAMILTONIEN
- NOETHER THÉORÈME DE
- POTENTIEL DE GRAVITATION
- SYMPLECTIQUE FORMALISME
- SCHRÖDINGER ÉQUATION DE
- POISSON CROCHET DE
- PHASES ESPACE DES
- MÉCANIQUE ANALYTIQUE
- HOLONÔME SYSTÈME
- HAMILTON PRINCIPE DE
- HAMILTON ÉQUATIONS CANONIQUES DE
- FORCE, physique
- LAGRANGE ÉQUATIONS DE
- FONCTION D'ONDE
- OPÉRATEUR
- QUANTIQUE MÉCANIQUE
- OBSERVABLE, mécanique quantique
- COMMUTATION RELATION DE
- TRAVAUX VIRTUELS PRINCIPE DES
- RELATIVITÉ GÉNÉRALE
- RELATIVITÉ RESTREINTE
- VARIATIONNELLE FORMULATION
- NEWTON LOIS DE, mécanique
- LAGRANGIEN
