
MÉCANIQUE Mécanique analytique
Article modifié le
Formalisme canonique
Formalisme hamiltonien
Récapitulons les calculs qui interviennent lorsqu'on applique les équations de Lagrange à un système répondant aux conditions précédentes.
– On considère les variables qk, .qk et t comme indépendantes, et on écrit la fonction lagrangienne :

– On calcule les dérivées partielles :

– On résout les équations différentielles :

(On reconnaît les équations de Lagrange (14) et la définition initiale des variables .qk.)
Si on développe le système (22), on constate qu'il se compose de n équations dans lesquelles les variables .qk interviennent linéairement, et que le déterminant des coefficients n'est pas nul (cela résulte du fait que l'énergie cinétique est une forme quadratique définie positive) ; on peut donc résoudre ces équations par rapport aux .qk ; ce que nous noterons :

Introduisons maintenant une nouvelle grandeur, le hamiltonien du système, qui est par définition la quantité :

En remplaçant dans cette relation Q. par son expression (24), on exprime évidemment H en fonction de P, Q et t :

Donnons une variation arbitraire δ aux variables P et Q ; la dérivation de (25) donne évidemment :


En comparant avec les résultats de la dérivation directe de (26), on trouve donc les identités :

En utilisant ces identités, les équations du mouvement (23) se transforment immédiatement en :

Telles sont les équations de Hamilton (1834), appelées aussi équations canoniques ; elles montrent qu'il suffit de connaître la fonction hamiltonienne pour déterminer les équations du mouvement. On les interprète souvent en considérant que les « variables canoniques » pk et qk sont les coordonnées d'un point qui se meut dans un espace à 2 n dimensions, appelé espace de phase.
Formalisme symplectique
Désignons par Y une condition initiale quelconque du système : pour déterminer Y, il faut se donner une date t, ainsi que la position et la vitesse de tous les points du système à cette date.

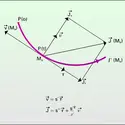
Espace d'évolution
Encyclopædia Universalis France
Nous avons remarqué que l'on connaît ces positions et ces vitesses si l'on connaît les valeurs des variables qk et .qk à cet instant t ; par conséquent, une condition initiale Y est repérée par les 2 n + 1 variables qk, .qk et t (ou, si l'on préfère, par les 2 n + 1 variables pk, qk, t ). On peut donc représenter Y comme un point d'un espace V à 2 n + 1 dimensions, l'espace d'évolution .
Lorsque le système évolue spontanément, le point Y décrit une courbe tracée dans V, courbe qui définit le mouvement du système ; il résulte de la théorie des systèmes différentiels qu'une condition initiale caractérise le mouvement, c'est-à-dire que ces courbes sont disposées dans V de façon qu'il en passe une et une seule par chaque point Y de V.
On peut donc définir un mouvement par les 2 n valeurs des coordonnées canoniques à une date t0 arbitrairement choisie ; en d'autres termes, chaque mouvement x peut être considéré comme un point d'un espace U à 2 n dimensions, l'espace des mouvements. Par exemple, le mouvement d'une planète (n = 3) se repère par 6 nombres (les éléments de l'orbite).
Un mouvement déterminé sera donc considéré :
a) comme une ligne (trajectoire) décrite par le point Q dans l'espace de configuration à n dimensions (le temps jouant le rôle de paramètre) ;
b) comme une ligne décrite par le point (Q, P) dans l'espace des phases à 2 n dimensions (le temps jouant le rôle de paramètre) ;
c) comme une ligne atemporelle dans l'espace d'évolution à 2 n + 1 dimensions ;
d) comme un point atemporel dans l'espace des mouvements à 2 n dimensions.
Considérons deux variations quelconques du mouvement,[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Francis HALBWACHS : docteur ès sciences physiques, professeur à l'université de Provence
- Jean-Marie SOURIAU : directeur du Centre de physique théorique de Marseille (C.N.R.S.)
Classification
Média
Espace d'évolution
Encyclopædia Universalis France
Autres références
-
ACTION & RÉACTION, physique
- Écrit par Jean-Marc LÉVY-LEBLOND
- 1 499 mots
...Théodicée de Leibniz, que la physique voit s'imposer une autre notion d'action. À l'origine de cette terminologie donc, la puissance divine. Plus laïquement, Joseph Louis Lagrange (1736-1813) montrera que la mécanique de Newton peut se déduire d'un « principe variationnel ». L'idée en est... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 102 mots
- 2 médias
 La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile...
La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile... -
CAUSALITÉ
- Écrit par Raymond BOUDON , Marie GAUTIER et Bertrand SAINT-SERNIN
- 12 990 mots
- 3 médias
 ...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa...
...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa... -
CINÉMATIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 5 548 mots
- 10 médias
La cinématique est la théorie qui, à l'intérieur de la mécanique, a pour objet la description des mouvements des systèmes matériels.
Deux notions sont absolument indispensables à l'élaboration de la cinématique sous sa forme classique : celle de solide invariable et celle de ...
- Afficher les 39 références
Voir aussi
- CHRISTOFFEL SYMBOLES DE
- CHAMP GRAVITATIONNEL
- MOINDRE ACTION PRINCIPE DE
- CONFIGURATION ESPACE DE
- HAMILTONIEN
- NOETHER THÉORÈME DE
- POTENTIEL DE GRAVITATION
- SYMPLECTIQUE FORMALISME
- SCHRÖDINGER ÉQUATION DE
- POISSON CROCHET DE
- PHASES ESPACE DES
- MÉCANIQUE ANALYTIQUE
- HOLONÔME SYSTÈME
- HAMILTON PRINCIPE DE
- HAMILTON ÉQUATIONS CANONIQUES DE
- FORCE, physique
- LAGRANGE ÉQUATIONS DE
- FONCTION D'ONDE
- OPÉRATEUR
- QUANTIQUE MÉCANIQUE
- OBSERVABLE, mécanique quantique
- COMMUTATION RELATION DE
- TRAVAUX VIRTUELS PRINCIPE DES
- RELATIVITÉ GÉNÉRALE
- RELATIVITÉ RESTREINTE
- VARIATIONNELLE FORMULATION
- NEWTON LOIS DE, mécanique
- LAGRANGIEN
