
MICROSYSTÈMES, technologie
Bibliographie
S. Basrour, S. Ballandras, L. Robert & D. Hauden, « Mechanical Characterization of microgrippers realized by LIGA Technique », in IEEE Digest of Tech. Papers for the Int. Conf. On Solid State Sensors and Actuators-Transducers'97, pp. 599-602, 1997
M. Despart & P. Vettiger, « Micro-Nanosystem Technology for Probe-based Data Storage », in MST News, no 3, pp. 10-12, juin 2003
J. E. Ford, C. C. Chaung, J. A. Walker, V. Aksyuk, D. J. Bishop & C. Doeir, « Data transmission through a 16-channel micro-opto-mechanical wavelength add/drop switch », in Solid State Sensors and Actuators Workshop, pp. 11-12, 1998
A. Fuchs, M. Bruel & H. Wicht, « DNA chips, a breakthrough in high throughput genetic analysis », in MST News, no 4, pp. 18-19, sept. 2000
Guide to the implementation services of the Canadian Microelectronics Corporation GICIS 3.0 CMC, Carruthers Hall, Queen's University, Kriston (Canada), janv. 1987
J. Ji & K. D. Wise, « An implantable CMOS circuit interface of multiplexed microelectrode recording arrays », in IEEE J. of Solid State Circuits, vol. 27, no 3, mars 1992
J. F. Manceau, S. Biwersi & F. Bastien, « On the generation and identification of travelling waves in non –circular structures. Application to innovative piezoelectric motors », in Journal of Smart Materials and structures, vol. 7, pp. 337-344, 1998
K. E. Petersen, « Silicon as a mechanical material », in Proc. of the IEEE, no 70, pp. 420, 1982
W. Simon, A. Lauer, B. Schaunenwecker & A. Wien, « EM design of an isolated coplanar RF Cross for MEMS switch matrix applications », in 4th Topical Meeting on Silicon Macrolithic Integrated Circuits in RF Systems, pp. 162-165, avril 2003
Y. C. Tai, L. S. Fan & R. S. Muller, « IC-processed micromotors : design technology and testing », in Proc. of the IEEE Micro-Electro-Mechanical Systems Workshop, pp. 1-6, Salt Lake City, Utah, févr. 1989
B. Wenks, B. Wagner, G. U. Jansen & E. Orsier, « Customer Support and design service for physical measurment Systems », in MST News, no 2, 1998, pp. 30-31, avril 2000.
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Daniel HAUDEN : professeur, directeur scientifique des sciences et technologies de l'information et de la communication au ministère de la Recherche
Classification
Médias

Microélectronique : fabrication d'un inverseur CMOS
Encyclopædia Universalis France
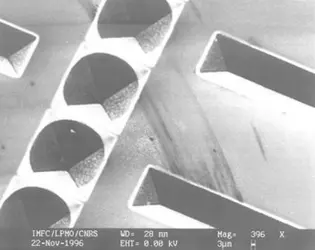
Microsystèmes : procédé d'usinage anisotrope du silicium
D.R./ FEMTO-ST, Besançon
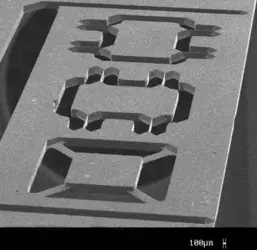
Microsystèmes : structure tridimensionnelle micro-usinée
D.R./ FEMTO-ST, Besançon
Autres références
-
MICROROBOTS
- Écrit par Philippe BIDAUD
- 296 mots
D'une manière générale, on désigne par microrobots des systèmes qui, du fait des contraintes dimensionnelles qu'ils subissent, ne peuvent pas être conçus à l'aide des technologies classiques utilisées dans les robots macroscopiques, mais avec les microtechnologies voire les...
-
NANOTECHNOLOGIES
- Écrit par Claude WEISBUCH
- 6 289 mots
- 4 médias
 Un domaine connexe est celui des microsystèmes, d'une taille allant du centimètre à la dizaine de micromètres, fabriqués en grande série grâce aux techniques de fabrication collectives de la microélectronique. Les applications sont variées (accéléromètres déclencheurs d'airbags de voiture...
Un domaine connexe est celui des microsystèmes, d'une taille allant du centimètre à la dizaine de micromètres, fabriqués en grande série grâce aux techniques de fabrication collectives de la microélectronique. Les applications sont variées (accéléromètres déclencheurs d'airbags de voiture... -
PUCES À ADN ET LABORATOIRES SUR PUCE
- Écrit par Michel BELLIS et Claude VAUCHIER
- 2 267 mots
- 2 médias

Les progrès techniques, en particulier la miniaturisation, ont permis le développement d'appareillages d'analyse performants pour les biologistes. Après la puce à ADN (appelée ainsi par analogie avec les circuits intégrés), mise au point au début des années 1990 et permettant d'effectuer...
-
ROBOTS
- Écrit par Philippe COIFFET
- 14 081 mots
- 1 média
 ...environ, on est allé vers « le haut » avec des robots transportant jusqu'à environ une tonne sur des distances de plusieurs mètres, et vers « le bas » en élaborant de tout petits robots pouvant contrôler des déplacements de l'ordre du micromètre dans quelques centimètres cubes, constituant ainsi ce qu'on...
...environ, on est allé vers « le haut » avec des robots transportant jusqu'à environ une tonne sur des distances de plusieurs mètres, et vers « le bas » en élaborant de tout petits robots pouvant contrôler des déplacements de l'ordre du micromètre dans quelques centimètres cubes, constituant ainsi ce qu'on...
