RHÉOLOGIE
Article modifié le
Principaux comportements
Pour donner une description mathématique précise du comportement mécanique macroscopique observé, on suppose que toutes les grandeurs qui caractérisent la réponse de la matière sont réparties d'une manière continue. Une telle conception, qui repose sur certaines hypothèses statistiques implicites, permet de définir la distribution des déformations et des contraintes comme des champs tensoriels (cf. élasticité). Les relations entre ces champs sont appelées lois de comportement ou équations constitutives.
En rhéologie, pour englober toute la variété des propriétés des matériaux réels, on se sert souvent de la description à un paramètre, où une contrainte représentative est reliée à la déformation ou à la vitesse de déformation correspondantes. Pour fixer les idées, cette contrainte peut être une traction ou une cission pour les corps peu déformables ; elle est de préférence une cission pour les corps très déformables. La généralisation au milieu tridimensionnel ne pose en général que des difficultés d'ordre mathématique.
Comportements élémentaires
Un solide idéal qui ne se déformerait pas, même sous l'action de forces élevées, est appelé solide d'Euclide, tandis que le solide de Hooke se déforme linéairement avec la contrainte. Dans les schémas rhéologiques, ce dernier se représente par un ressort. Un autre solide idéal, représenté par un patin, est qualifié de rigide-plastique. Soumis à une contrainte de cisaillement, il ne se déforme qu'à partir d'un certain seuil que la contrainte ne peut en aucun cas dépasser.
Si le liquide de Pascal, parfaitement mobile et incompressible, n'oppose que son inertie à la déformation de cisaillement, le liquide de Newton est caractérisé par une proportionnalité entre la contrainte et la vitesse de déformation. Il est représenté par un amortisseur.

Ces trois sortes de propriétés sont ensuite associées pour représenter de nombreux comportements réels. Néanmoins, certains de ceux-ci échappent à ce mode de représentation et nécessiteraient l'introduction d'autres modèles élémentaires.
Viscoélasticité
Ce sont principalement les hauts polymères (par exemple poly-isobutylène sec ou en solution) qui manifestent de la viscoélasticité ; mais divers autres matériaux en sont doués aussi : pâtes boulangères, argiles, etc.
Ce phénomène apparaît nettement au cours d'un essai de relaxation ou d'un essai de retard (appelé quelquefois essai de fluage). Dans l'essai de relaxation, une déformation est imposée brusquement, puis maintenue constante ensuite. La contrainte qui en résulte diminue progressivement à mesure que le temps s'écoule. Dans le second type d'essai, qui s'applique aussi bien aux solides qu'aux liquides, c'est la contrainte qui est appliquée brusquement et maintenue constante pendant un certain temps. À la déformation élastique instantanée s'ajoute une déformation différée (ou retardée). La suppression brusque de la contrainte (décharge) entraîne de la même façon une recouvrance élastique instantanée suivie d'une recouvrance différée, de nature viscoélastique. Le fluage est, pour les métallurgistes, une déformation retardée non recouvrable à la décharge.

Relaxation d'un polyisobutylène
Encyclopædia Universalis France

Fluage sur un polyisobutylène
Encyclopædia Universalis France
Linéarité du comportement
Les expressions qui suivent sont générales pour un processus unidimensionnel. Les rapports qui y sont définis (fonction de relaxation, fonction de retard, modules, complaisances, coefficients de viscosité, etc.) ne correspondent quelquefois à ceux, usuels, de la théorie tridimensionnelle qu'à un facteur près.
Une frontière importante est à jeter entre les comportements dits linéaires et ceux qui ne le sont pas. Boltzmann, en 1874, a posé le principe de superposition qui porte son nom et qui peut servir de base à la linéarité. La contrainte supportée par un corps à un instant donné ne dépend pas seulement de la déformation actuelle du corps, mais aussi des déformations qu'il a subies dans le passé. Cette contrainte est la somme de toutes celles que chacune de ces déformations aurait produites à l'instant actuel si elle avait agi seule. En prenant comme origine des temps l'instant de la première sollicitation, ou un instant antérieur, cette additivité des effets des actions passées et actuelle se traduit par la relation :


Des explications identiques peuvent être données en permutant les mots « déformation » et « contrainte ». La relation homologue à (1) s'écrit :


En faisant intervenir les transformées de Laplace-Carson des grandeurs qui entrent en jeu, transformées désignées par les mêmes lettres surmontées d'une croix, les relations (1) et (2) deviennent :


Essai harmonique
L'application d'une sollicitation sinusoïdale fait apparaître un retard de la déformation sur la contrainte :

L'énergie dissipée par cycle et par unité de volume est :

C'est l'aire du cycle d'hystérésis décrit dans le diagramme contrainte-déformation. Le rapport σ*/ε* et son inverse conduisent à définir le module complexe :


Entre les composantes de ces grandeurs existent les relations suivantes :


Le module et la complaisance complexes sont les images Laplace-Carson des fonctions de relaxation et de retard, dans lesquelles la variable p est remplacée par iω :

En viscoélasticité linéaire, le passage au milieu tridimensionnel n'offre pas de difficulté particulière. Les équations classiques de l'élasticité, qui sont une généralisation des équations (3), restent valables entre les images Laplace-Carson des déformations, des contraintes et des coefficients élastiques, fonctions du temps. Dans le cas particulier du régime harmonique, ce sont ces mêmes grandeurs, sous leur forme complexe (et fonction de la fréquence), qu'il est avantageux de considérer dans les équations classiques.
Modèles viscoélastiques
Modèles de Maxwell et de Kelvin-Voigt
Encyclopædia Universalis France
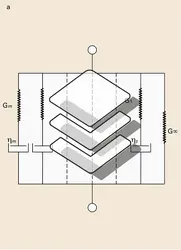
Un comportement viscoélastique linéaire peut se représenter par des associations de ressorts et d'amortisseurs, éventuellement en nombre infini. Les deux modèles principaux, représentés sur la figure, permettent de donner une forme mathématique, l'un à la fonction de relaxation :


On en déduit les valeurs du module complexe :


Les coefficients ηm, ηn et η∞ sont définis sur la figure.
Pour préciser davantage les propriétés des corps réels, on est amené à envisager une distribution continue des temps de relaxation et de retard. Si H(τ) d ln τ est la somme des modules correspondant aux temps de relaxation dont les logarithmes sont compris entre ln τ et ln τ + d ln τ, les relations (4) et (6) deviennent :

Quant aux relations (5) et (7), elles deviennent, pour une distribution continue des temps de retard :

Élastoplasticité
Une pièce métallique soumise à une force supérieure à un certain niveau ne reprend pas ses dimensions primitives après retour au repos. Aux basses températures, cette déformation rémanente dépend peu de la durée de la sollicitation. C'est le phénomène d'élastoplasticité.

Groupements M et K
Encyclopædia Universalis France
Le seuil de plasticité est souvent mal défini et dépend notamment de la précision avec laquelle les dimensions sont mesurées. Au-delà de ce seuil apparaissent des modifications des propriétés mécaniques, appelées écrouissage. En déformation croissante, le seuil de plasticité s'élève : c'est le durcissement. En revanche, le seuil peut s'abaisser en valeur absolue pour des contraintes du signe opposé : c'est l'effet Bauschinger. Dans une certaine mesure, il est possible de rendre compte de ces faits avec des modèles comprenant des ressorts et des patins. La courbe de première déformation a sa convexité tournée vers l'axe des contraintes et peut comporter des points anguleux. Si σ = S(ε) est son équation et si, à partir du point A, la sollicitation se met à décroître, la courbe de retour est donnée par :


Accommodation immédiate
Encyclopædia Universalis France
Après avoir décrit cet arc jusqu'au point B, un nouveau changement de sens place le point représentatif sur un arc d'équation :

Ce troisième arc repasse par A. L'accommodation est immédiate. Cela veut dire que, si l'une des variables oscille entre deux limites A et B, le cycle d'hystérésis obtenu est fixé dès le premier aller et retour. Son aire représente évidemment l'énergie perdue par unité de volume.
Ce qui vient d'être dit concerne toute association entièrement décomposable en branches disposées soit en série, soit en parallèle. Lorsque les modèles font apparaître des ponts, les propriétés sont moins simples. L'accommodation peut être différée ou supprimée complètement. Dans ce dernier cas, la déformation augmente d'une quantité constante à chaque cycle de contrainte. Lors de sollicitations triaxiales, la plasticité apparaît lorsque le déviateur des contraintes satisfait à un critère déterminé : Tresca, von Mises ou autres.

Modèle en Pont
Encyclopædia Universalis France

Accommodation différée
Encyclopædia Universalis France
Viscoplasticité
Pour les corps plastiques réels, pour les métaux à une température notable (vis-à-vis du point de fusion), pour la pâte à modeler, le beurre à 20 0C, le ciment avant la prise, etc., la contrainte nécessaire pour provoquer l'écoulement dépend de la vitesse de déformation ˙ε : l'écoulement est viscoplastique.
Le cas idéal le plus simple est ceuli de Bingham. L'écoulement ne se produit qu'à partir d'un certain seuil s bien défini, et il est ensuite linaire :


Écoulement de Bingham
Encyclopædia Universalis France

Modèle de Bingham
Encyclopædia Universalis France
Les associations plus compliquées de patins et d'amortisseurs sont susceptibles de reproduire tous les écoulements dépourvus d'hystérésis de vitesse de déformation (la courbe de retour coïncide avec celle d'aller dans le diagramme σ-˙ε) et dont la viscosité apparente diminue avec la contrainte. Certains les qualifient de pseudoplastiques. Il est plus correct de les appeler fluidifiants stables (cf. infra, Corps très déformables). Une équation souvent proposée pour des corps aussi différents que les métaux, la glace, la crème du lait est la suivante :

Corps très déformables
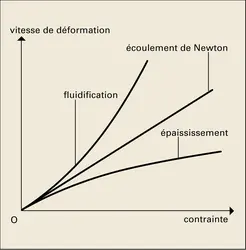
Écoulements newtonien et non newtonien
Encyclopædia Universalis France
Les corps très déformables sont les pâtes, crèmes, peintures, solutions et dispersions diverses. L'expérience type consiste à les placer dans un viscosimètre rotatif (à plan cône ou à cylindres coaxiaux) dont la vitesse est imposée. Considérons un écoulement où, après un long repos, la vitesse de déformation est brusquement appliquée, puis maintenue constante. La viscosité apparente (rapport σ/˙ε) peut dépendre de cette vitesse et de la durée t d'application de cette vitesse. Il y a fluidification si, pour une durée t déterminée, la viscosité apparente est fonction décroissante de la vitesse. Il y a épaississement (certains disent dilatance) dans le cas contraire. Une suspension aqueuse d'amidon est épaississante. La fluidification est stable, progressive ou dégressive suivant que, lorsque la durée t augmente, la viscosité apparente reste invariable, décroît ou croît. L'épaississement est stable, progressif ou dégressif suivant que, quand la durée t augmente, la viscosité apparente reste invariable, croît ou décroît. Si ces corps sont stables, il n'y a pas d'hystérésis de vitesse de déformation. Il y a seulement viscosité anormale.
La thixotropie caractérise un matériau fluidifiant progressif qui revient à son état initial après un long repos. Il s'agit là d'un phénomène fréquent, manifesté par diverses suspensions : hydroxyde ferrique et argiles dans l'eau, peintures, etc. L'antithixotropie est la propriété, plus rare, d'un corps fluidifiant dégressif qui recouvre également son état initial après un long repos.
Accédez à l'intégralité de nos articles
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Bernard PERSOZ : ingénieur de l'École supérieure de physique et de chimie industrielles, docteur ingénieur, ancien maître de recherche à l'O.N.E.R.A.
- Dragos RADENKOVIC : directeur de recherche, laboratoire de mécanique des solides de l'École polytechnique
Classification
Médias
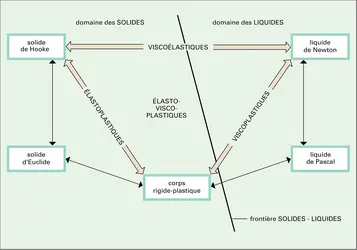
Comportements : classification
Encyclopædia Universalis France
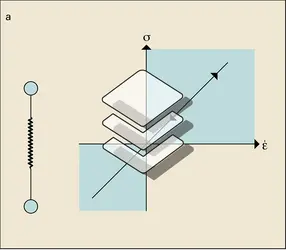
Solides de Hooke, rigide-pastique et liquide de Newton
Encyclopædia Universalis France
Relaxation d'un polyisobutylène
Encyclopædia Universalis France
Autres références
-
BÉTON
- Écrit par Jean-Michel TORRENTI
- 8 164 mots
- 1 média
À l'état frais, la propriété la plus importante du béton est saconsistance (ou ouvrabilité). Cette propriété traduit l'aptitude du béton à être mis en œuvre correctement. En laboratoire, on peut utiliser des rhéomètres pour caractériser le comportement du béton frais. Sur chantier, l'essai le plus... -
COLLOÏDES
- Écrit par Didier ROUX
- 6 011 mots
Contrairement au régime dilué, où les particules ne sont pas gênées par la présence de leurs voisines, au-dessus d'une certaine fraction volumique qui correspond à l'empilement compact (typiquement 60 p. 100), les particules doivent se déformer pour remplir l'espace. La viscosité devient alors de plus... -
EAU DU MANTEAU TERRESTRE
- Écrit par Édouard KAMINSKI
- 2 666 mots
- 3 médias
 ...laboratoire montrent que l'olivine hydratée est ainsi près de cinq fois plus déformable que l'olivine anhydre. De plus, une spécificité cruciale de la rhéologie des roches terrestres est qu'elle permet une forte localisation des déformations au niveau des frontières de plaques. Cela n'est pas possible...
...laboratoire montrent que l'olivine hydratée est ainsi près de cinq fois plus déformable que l'olivine anhydre. De plus, une spécificité cruciale de la rhéologie des roches terrestres est qu'elle permet une forte localisation des déformations au niveau des frontières de plaques. Cela n'est pas possible... -
FLUIDE, physique
- Écrit par Étienne GUYON
- 1 356 mots
Les trois états physiques de la matière tels qu'on les enseigne à l'école primaire sont le solide, le liquide et le gaz. L'état fluide rassemble les deux derniers termes, en soulignant leur parenté. Encore faut-il savoir que l'on parle du nom plutôt que de l'adjectif : une huile très visqueuse...
- Afficher les 12 références
Voir aussi
- MATÉRIAUX SCIENCE DES
- FLUAGE
- VISCO-ÉLASTICITÉ
- RELAXATION, physique
- HYSTÉRÉSIS
- DISPERSION, chimie
- ÉCOULEMENTS
- SOLIDE MÉCANIQUE DU
- DÉFORMATIONS, mécanique
- CONTRAINTES, mécanique
- THIXOTROPIE
- SOLIDES PHYSIQUE DES
- LAPLACE TRANSFORMATION DE
- PLASTICITÉ
- VISCOPLASTICITÉ
- ÉLASTOPLASTICITÉ
- BINGHAM MODÈLE DE
- BAUSCHINGER EFFET
- ESSAIS, matériaux
