
ROBOTIQUE CHIRURGICALE
Article modifié le
Depuis les années 1980, la robotique a trouvé un nouveau domaine d’application : la chirurgie. Un robot chirurgical se distingue d’un robot industriel par trois caractéristiques : il doit être sûr de fonctionnement car il travaille au contact du patient, du chirurgien et de son équipe ; il doit être stérilisable, ou tout au moins les composants qui sont au contact avec le patient ; il doit s’intégrer dans un bloc opératoire et, à ce titre, il doit être peu encombrant, facile à mettre en œuvre et à maintenir. Il hérite des robots conventionnels un certain nombre de propriétés qui lui permettent d’assurer naturellement de meilleures performances pour certaines tâches, notamment en termes de précision, répétabilité, stabilité du geste, intégration d’informations sur l'environnement issues de capteurs. Toutefois, comme le robot industriel, il est incapable de réagir de façon adéquate à des situations imprévues, les capacités d’analyse, de décision, d’adaptation et d’apprentissage étant, encore pour longtemps, l’apanage de l’homme.
Un robot chirurgical est avant tout un système d’assistance au geste du chirurgien. Il peut certes réaliser quelques gestes de façon automatique, mais il est le plus souvent soit télémanipulé, via une interface appropriée (généralement un bras maître), soit comanipulé par une action directe du chirurgien sur l’instrument porté par le robot. Le choix du mode de commande des robots (automatique, télémanipulé ou comanipulé) dépend du geste chirurgical à accomplir et, donc, de considérations d'ergonomie de l'interface homme-machine. Le mode automatique, par exemple, peut convenir pour certaines tâches d'usinage en chirurgie orthopédique. Les robots télémanipulés sont les plus nombreux car c’est le mode de commande du robot Da Vinci, le plus répandu aujourd’hui.
Histoire de la robotique chirurgicale
Les premiers robots chirurgicaux étaient de simples robots industriels qui ont été sécurisés pour pouvoir être mis en œuvre en salle d’opération et sur lesquels ont été adaptés des instruments conventionnels de chirurgie. On peut citer quelques dispositifs pionniers :
– Le robot Puma 260 est le premier de tous. Il a été utilisé en neurochirurgie sur une vingtaine de patients à l’hôpital de Long Beach (Californie) en 1985.
– Un robot Scara, fruit d’une collaboration entre IBM Yorktown Heights et l’université de Californie à Davis, a été conçu entre 1986 et 1989 pour la chirurgie orthopédique. C’est à partir de ce dispositif qu’a été développé Robodoc. Ce dernier, commercialisé depuis 1992, a effectué plusieurs milliers de poses de prothèse de hanche.
– Speedy est un robot de la société française AID (aujourd’hui disparue) qui a été adapté en 1989 par le laboratoire T.I.M.C. (techniques de l'imagerie, de la modélisation et de la cognition) de Grenoble pour être utilisé en neurochirurgie stéréotaxique (technique qui, grâce à un dispositif mécanique fixé sur la tête, permet de localiser et d'atteindre de façon précise des structures cérébrales profondes).
– Le robot Puma 560 a permis, en 1990, à une équipe médicale d’Imperial College à Londres, d’effectuer une ablation de la prostate.
Développement des robots chirurgicaux
Au début des années 1990, les premiers prototypes de robots spécifiquement conçus pour la chirurgie ont été développés. Ceux-ci présentent des architectures mécaniques adaptées au geste chirurgical à réaliser. Certains d’entre eux sont couplés à un système d’imagerie médicale. À la différence du robot industriel, l'homme coopère en permanence (le chirurgien) ou interagit (le patient) avec le robot chirurgical. Des contraintes et des spécifications sévères doivent donc être respectées dans la conception de ses différents composants (mécaniques, électriques, logiciels) pour qu'ils soient intrinsèquement[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Étienne DOMBRE : directeur de recherche au C.N.R.S., laboratoire d'informatique, robotique et microélectronique de Montpellier, U.M.R. 5506, université de Montpellier-II
Classification
Médias

Robot médical
Intuitive Surgical, Inc.

Les robots médicaux
Encyclopædia Universalis France
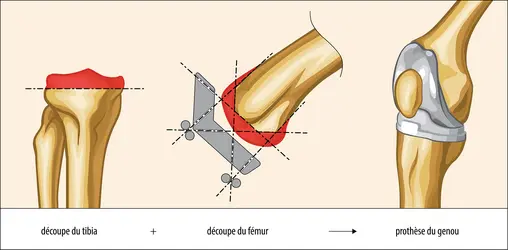
Découpes osseuses pour la mise en place d'une prothèse de genou
Encyclopædia Universalis France
Autres références
-
BIOÉTHIQUE ou ÉTHIQUE BIOMÉDICALE
- Écrit par Gilbert HOTTOIS
- 7 798 mots
- 1 média
 ...humaines. Ces IA ont commencé à développer des capacités de diagnostic et de pronostic qui dépassent l’expérience limitée des médecins. Associées à la robotique, ces IA les surpasseront aussi en chirurgie, déjà technologiquement très assistée. Comme le souligne le Groupe européen d’éthique des sciences...
...humaines. Ces IA ont commencé à développer des capacités de diagnostic et de pronostic qui dépassent l’expérience limitée des médecins. Associées à la robotique, ces IA les surpasseront aussi en chirurgie, déjà technologiquement très assistée. Comme le souligne le Groupe européen d’éthique des sciences... -
OPÉRATION LINDBERGH
- Écrit par Encyclopædia Universalis
- 585 mots
La première intervention de téléchirurgie à très longue distance sur un humain est réalisée avec succès le 7 septembre 2001 entre New York et Strasbourg. La réussite de l’opération, une ablation de la vésicule biliaire sur une patiente de soixante-huit ans, est annoncée le 19 septembre, une semaine...
-
PRIX NOBEL DE CHIMIE 2016
- Écrit par Jacques MADDALUNO
- 1 120 mots
- 3 médias
Le prix Nobel de chimie 2016 a été attribué au Français Jean-Pierre Sauvage, au Britannique James Fraser Stoddart et au Néerlandais Bernard Lucas Feringa pour leurs travaux sur la conception et la synthèse de machines moléculaires.
Les machines moléculaires répondent à une question fondamentale :...
Voir aussi
- COMMANDE
- MICROCHIRURGIE
- ENDOSCOPE
- TÉLÉOPÉRATION
- OPÉRATION CHIRURGICALE
- TÉLÉMANIPULATION
- PRÉCISION
- MINIATURISATION, technologie
- CHIRURGIE VIDÉO-ENDOSCOPIQUE
- TÉLÉCHIRURGIE
- ENDOSCOPIE
- RADIOLOGIE INTERVENTIONNELLE
- MÉDECINE HISTOIRE DE LA
- NEUROCHIRURGIE
- ORTHOPÉDIQUE CHIRURGIE
- TREMBLEMENT
- CHIRURGIE MINI-INVASIVE
