
ROBOTIQUE CHIRURGICALE
Que peuvent faire les robots chirurgicaux ?
Outre la chirurgie orthopédique, la neurochirurgie et la chirurgie mini-invasive, pour lesquelles les principes fondateurs de la robotique chirurgicale se sont développés, d’autres spécialités contribuent désormais à son déploiement comme la chirurgie cardiaque, la chirurgie urologique, la radiologie interventionnelle… Une façon de montrer à quoi peut servir un robot dans un bloc opératoire est d’analyser certaines fonctions, propres à ces spécialités, où le robot est susceptible d’améliorer les performances de l’homme, seul ou en coopérant avec lui.
Chirurgie orthopédique
Dans cette spécialité, le chirurgien utilise des outils pour scier, percer, fraiser… Par exemple, l'arthroplastie (réfection chirurgicale d'une articulation) du genou par mise en place d’une prothèse nécessite la découpe du tibia et du fémur selon plusieurs plans. Sur le fémur particulièrement, cette découpe doit être très précise pour que la prothèse s’emboîte sans jeu, ce qui permet d’éviter des descellements ultérieurs. En outre, l’orientation de ces plans doit être telle que, une fois la prothèse mise en place, l’alignement anatomique des axes mécaniques du tibia et du fémur soit respecté (pas de valgus ou de varus, d’hyperextension du genou…). Dans les protocoles opératoires conventionnels, le chirurgien utilise des gabarits qui permettent de définir précisément les plans de coupe. Ces gabarits sont longs à mettre en place et sont spécifiques pour chaque modèle et dimension de prothèse.
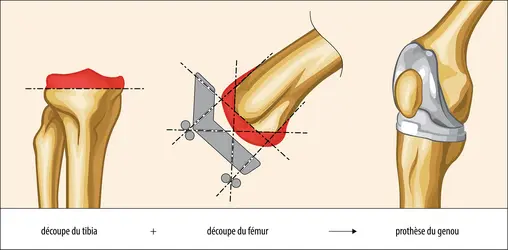
Découpes osseuses pour la mise en place d'une prothèse de genou
Encyclopædia Universalis France
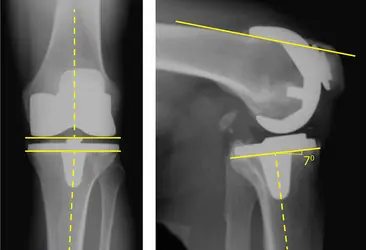
Axes mécaniques du tibia et du fémur
E. Stindel
Dès le milieu des années 1990, les chirurgiens ont commencé à utiliser des systèmes de localisation, dits systèmes de navigation, pour assurer une précision de découpe ou de perçage. Souvent présentés comme le GPS du chirurgien, de tels dispositifs mesurent en temps réel les coordonnées spatiales de l’instrument et en restituent sur un écran une image virtuelle superposée à une image préopératoire ou peropératoire. Le chirurgien est alors à même de suivre la progression de l’instrument utilisé et, par exemple, de l’aligner sur des axes mécaniques ou des plans de coupe matérialisés lors de la planification chirurgicale.
Par rapport à un système de navigation, le robot restitue la position et l'orientation de l'instrument avec une meilleure précision. Il permet en outre de mémoriser des positions de travail, de réaliser des usinages osseux complexes et de maintenir un instrument en position fixe. Il devrait permettre à terme d’envisager des arthroplasties moins invasives.
Chirurgie mini-invasive
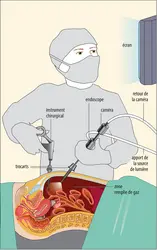
Principe de la chirurgie mini-invasive
Encyclopædia Universalis France
Les premières interventions sous endoscopie datent des années 1970 et concernent la chirurgie gynécologique. Elles se sont ensuite imposées face à la chirurgie ouverte, notamment en chirurgie digestive, après la première ablation de la vésicule biliaire (cholécystectomie)réalisée par le Français Philippe Mouret (1938-2008) en 1987 à Lyon. Depuis lors, on parle de chirurgie mini-invasive puisque cette technique nécessite, pour le passage des instruments, de petites incisions (de l’ordre du centimètre), ce qui évite le traumatisme opératoire lié aux larges ouvertures. En chirurgie abdominale (on parle de laparoscopie), on distend la cavité en insufflant du dioxyde de carbone (CO2) afin de donner plus d’espace pour les instruments. Les trocarts assurent le passage des instruments, qui sont rallongés par rapport aux instruments conventionnels, et d’un endoscope qui permet au chirurgien de visualiser sur un écran ce qu’il est en train de faire.
Cette modalité opératoire présente quelques difficultés :
– le chirurgien a besoin d’un assistant pour tenir l’endoscope et l’orienter vers la zone d’intérêt, ce qui implique de la part de l’assistant une bonne réactivité aux ordres reçus, si possible même la capacité à les anticiper ;
– les images retournées par l’endoscope[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Étienne DOMBRE : directeur de recherche au C.N.R.S., laboratoire d'informatique, robotique et microélectronique de Montpellier, U.M.R. 5506, université de Montpellier-II
Classification
Médias

Robot médical
Intuitive Surgical, Inc.

Les robots médicaux
Encyclopædia Universalis France
Découpes osseuses pour la mise en place d'une prothèse de genou
Encyclopædia Universalis France
Autres références
-
BIOÉTHIQUE ou ÉTHIQUE BIOMÉDICALE
- Écrit par Gilbert HOTTOIS
- 7 798 mots
- 1 média
 ...humaines. Ces IA ont commencé à développer des capacités de diagnostic et de pronostic qui dépassent l’expérience limitée des médecins. Associées à la robotique, ces IA les surpasseront aussi en chirurgie, déjà technologiquement très assistée. Comme le souligne le Groupe européen d’éthique des sciences...
...humaines. Ces IA ont commencé à développer des capacités de diagnostic et de pronostic qui dépassent l’expérience limitée des médecins. Associées à la robotique, ces IA les surpasseront aussi en chirurgie, déjà technologiquement très assistée. Comme le souligne le Groupe européen d’éthique des sciences... -
OPÉRATION LINDBERGH
- Écrit par Encyclopædia Universalis
- 585 mots
La première intervention de téléchirurgie à très longue distance sur un humain est réalisée avec succès le 7 septembre 2001 entre New York et Strasbourg. La réussite de l’opération, une ablation de la vésicule biliaire sur une patiente de soixante-huit ans, est annoncée le 19 septembre, une semaine...
-
PRIX NOBEL DE CHIMIE 2016
- Écrit par Jacques MADDALUNO
- 1 120 mots
- 3 médias
Le prix Nobel de chimie 2016 a été attribué au Français Jean-Pierre Sauvage, au Britannique James Fraser Stoddart et au Néerlandais Bernard Lucas Feringa pour leurs travaux sur la conception et la synthèse de machines moléculaires.
Les machines moléculaires répondent à une question fondamentale :...
