
ROBOTIQUE ET PSYCHOLOGIE
Vers des robots interactifs et une robotique développementale
Robot Berenson
LabEx PATRIMA et EquipEx PATRIMEX
Maintenant qu’il est possible d’obtenir des robots effectuant des tâches complexes, la question des interactions entre l’homme et le robot devient un sujet important. Tout d’abord, il paraît souhaitable que ce dernier ne réalise pas d’actions impossibles ou incompréhensibles pour un humain. Par exemple, un robot peut trouver efficace de présenter un objet à un humain sans se retourner, en passant son bras par derrière son « buste », mais de tels gestes impliquent en général l’échec de l’interaction avec l’humain. Ajouter une tête même vaguement anthropomorphique avec des yeux qui s’orientent dans la direction de ce que regarde le robot permet de faciliter l’interaction.
L’humain peut ainsi lire intuitivement les « intentions » du robot et des tâches impliquant une attention conjointe entre l’homme et le robot deviennent possibles. La liste des actions qu’un robot devrait pouvoir reproduire pour interagir correctement avec un humain s’allonge tous les jours, posant la question de savoir si une description sous forme d’un ensemble limité de fonctions indépendantes est pertinente. En effet, les différents types de comportements observés pourraient résulter de propriétés émergeant des interactions dynamiques entre un petit nombre de sous-systèmes. Par exemple, dans les théories simulationnistes, la reconnaissance d’une action implique le cortex moteur pour simuler la conséquence de l’action observée. Ces questions font l’objet de nombreux débats en psychologie et en robotique. La robotique développementale ou épigénétique tente de comprendre comment un robot pourrait apprendre petit à petit une tâche qui serait trop complexe à appréhender ou à résoudre en une seule fois. Suivant la voie ouverte par les psychologues, de nombreux travaux en robotique se focalisent sur des apprentissages en interaction avec un humain (apprentissage par démonstration ou par imitation). Ces travaux obligent à intégrer une dimension sociale à l’apprentissage et à comprendre et analyser les processus cognitifs à des niveaux multiples : importance du corps et de ses limitations pour structurer l’ordre dans lequel certaines tâches sont apprises, importance des capacités d’autoévaluation des individus leur permettant de détecter leurs échecs ou réussites, et enfin capacité à exploiter les interactions sociales pour développer de nouvelles compétences. On a ainsi pu montrer grâce à des robots qu’imiter n’était pas qu’un moyen d’apprentissage mais était aussi un bon moyen d’enseigner et de communiquer. Un très grand nombre de questions se posent en robotique cognitive ou développementale et en psychologie sur l’interdépendance ou non du développement sensori-moteur et du développement de capacités de raisonnement plus abstraites liées au langage. Les robots apparaissent ainsi comme étant à la fois des outils très utiles et de fabuleuses machines pour nous interroger sur nous-mêmes et ce qui fonde notre humanité.
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Philippe GAUSSIER : professeur des Universités, responsable de l'équipe neurocybernétique du laboratoire ETIS, responsable du master Informatique et ingénierie des systèmes complexes de l'université de Cergy-Pontoise
Classification
Médias
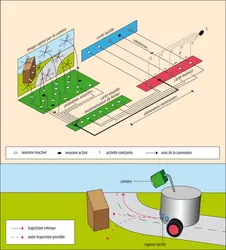
Exemple simplifié d’un réseau de neurones artificiels utilisé pour contrôler les déplacements d’un robot mobile
Encyclopædia Universalis France
Robot Berenson
LabEx PATRIMA et EquipEx PATRIMEX
