
ROBOTIQUE HUMANOÏDE ET SANTÉ
Évolution et défis technologiques de la robotique humanoïde
Depuis les travaux autour des robots bipèdes, initiés à l'université de Waseda au Japon dans les années 1970, différentes réalisations de prototypes de robots humanoïdes, par des industriels japonais du secteur automobile ou par des laboratoires européens, coréens ou, plus récemment, américains, ont vu le jour. Tous ces prototypes de robots humanoïdes affichent des performances très inférieures à celles d'un être humain sain, et cela en termes de vitesse de déplacement et surtout de consommation énergétique. Ceci est essentiellement dû aux différentes technologies employées pour réaliser les divers constituants mécaniques du robot humanoïde.
La démarche suivie pour le développement de ce type de machines a été principalement fondée sur l'assemblage de composants robotiques classiques, ce qui a abouti à des systèmes souvent très compliqués et peu efficaces. Ces dispositifs – comptant en moyenne une quarantaine de liaisons dont chacune possède un moteur électrique et un réducteur permettant d'augmenter le couple mécanique nécessaire à la réalisation du mouvement de chaque segment de la structure – ont pu bénéficier d'une évolution constante liée aux progrès accomplis pour les composants électroniques et informatiques nécessaires au contrôle des articulations. Cette évolution a ainsi permis d'aboutir à des dispositifs compacts mais dont l'autonomie et l'intelligence mettent en doute la prédiction japonaise selon laquelle une équipe de robots humanoïdes sera capable de battre une équipe de footballeurs humains d'ici à 2050.
Néanmoins, si l'on se fixe comme objectif ambitieux l'accomplissement de cette prédiction, un certain nombre de verrous technologiques portant essentiellement sur la motorisation (actionneurs) et le contrôle (via l'apprentissage) devront être levés. En effet, l'être humain possède une capacité phénoménale d'adaptation du comportement de ses articulations grâce à ses muscles. Ainsi, nous disposons de deux types de fonctionnement usuels (et complètement transparents) qui sont le mode isotonique (mouvement avec une force musculaire constante) et le mode isométrique (la position du membre est fixe et l'effort musculaire croit pour atteindre sa valeur maximale). L'habileté de l'être humain à changer d'une manière continue et intentionnelle la raideur de ses liaisons lui permet de réaliser des mouvements fluides, souples et économes en énergie. On parle alors de compliance active. Pour la reproduire, il faut inventer de nouveaux actionneurs et de nouvelles façons de réaliser les articulations et de les commander.
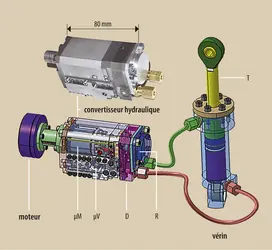
Transmission hydraulique miniaturisée
F.B. Ouezdou/ LISV-BIA
Ainsi, la transmission hydraulique miniaturisée, contrairement aux solutions classiquement adoptées en robotique, consiste à convertir la puissance électrique fournie par un moteur électrique à l'entrée en une puissance mécanique sous forme d'une vitesse et d'un effort au niveau du vérin, et cela d'une manière continue (cf. figure).
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Fethi BEN OUEZDOU : professeur des Universités, Laboratoire d'instrumentation et de relations individu-système (L.I.R.I.S.), université de Versailles-Saint-Quentin-en-Yvelines
Classification
