
ROBOTS
Le robot mobile
Même si l'industrie a besoin de mobilité, elle résout facilement ce problème avec les véhicules filoguidés ou sur rails etc., les conditions d'exploitation (atelier flexible par exemple) permettant un aménagement de l'espace. Aussi, on ne saurait y parler de véritables robots mobiles, lesquels sont caractérisés par la recherche de trajectoires variables et non définies à l'avance, posant ainsi des problèmes bien plus complexes que le robot à poste fixe. En effet, ce dernier se trouve dans un environnement a priori figé, avec de faibles variations correspondant soit à la succession des opérations d'exécution de la tâche soit à des perturbations limitées. On peut instrumenter cet environnement et/ou l'aménager pour limiter ou supprimer l'information qu'y doit prélever le robot pour exécuter sa tâche, d'où la relative simplicité de son système de commande. Par ailleurs ce robot est accessible à l'homme qui l'a « sous la main » pour le contrôler, le surveiller ou le réparer.
À l'opposé, le robot mobile, par nature, se caractérise par son éloignement de l'homme et par un environnement en permanence évolutif, ce qui engendre deux classes de problèmes dont les solutions efficaces en mode automatique n'existent encore que dans des cas particuliers fortement contraints (ou fortement simplifiés par rapport au cas général).
Distance homme-robot
La situation dans laquelle le robot est éloigné de l'homme se manifeste suivant deux type de cas :
– dans le premier, le robot est à poste fixe mais dans un lieu interdit d'accès à l'homme par les dangers que présente le milieu (eau, vide, radioactivité, risque d'explosion...). C'est typiquement le cas des milieux dits nucléaires où le problème de l'intervention se pose depuis longtemps (dans les centrales, par exemple) et a dû être résolu avec les moyens disponibles à chaque époque. Le mode d'intervention commun est connu sous le nom de téléopération ou télémanipulation.
– dans le second, le robot est véritablement mobile, ce qui soulève deux types de difficultés. Soit le véhicule a pour seule mission l'inspection de lieux à des fins de reconnaissance. Dans ce cas, deux questions se posent : celle de la reconnaissance du terrain ou de l'environnement pour être capable de progresser ; celle de la reconnaissance de « la bonne route » et des « cibles » imposées par la mission. Soit le véhicule est, de plus, doté d'outils afin d'exécuter des tâches physiques déterminées dans des lieux bien précis (prélèvement d'échantillons, d'objets, démontage, assemblage etc.). Ceci est aussi le cas des robots qui devraient se comporter correctement au milieu de la société humaine (robot « domestique »). Les problèmes de contrôle et de reconnaissance s'en trouvent considérablement complexifiés puisque c'est comme si on avait un robot pour agir sur l'environnement monté sur un robot de transport, les deux devant agir de manière coordonnée pour n'en plus faire qu'un.
Dans tous les cas, on doit considérer le système tripartite : robot-environnement-opérateur humain avec ses interactions. Le niveau d'automatisation de l'exécution des tâches par le robot dépend des informations pertinentes exploitables. Ces dernières peuvent pour partie être stockées à l'avance ou prélevées en ligne et réparties dans la mémoire de l'ordinateur de commande et/ou dans le cerveau de l'opérateur humain. Une partie peut aussi n'être accessible ni au robot ni à l'opérateur, ce qui oblige à tester des hypothèses (avec le risque qu'aucune ne soit valide). La répartition et le niveau de complétude des informations pertinentes accessibles limitent le niveau d'automatisation. En effet, pour réaliser une tâche, il est nécessaire de disposer d'un certain nombre d'informations.[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Philippe COIFFET : membre de l'Académie des technologies, ancien directeur de recherche au C.N.R.S.
Classification
Média
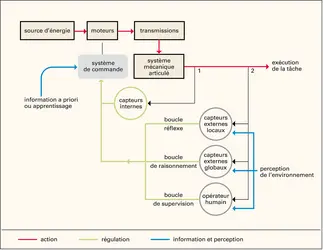
Robots : schéma de principe
Encyclopædia Universalis France
Autres références
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 291 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
-
ASIMOV ISAAC (1920-1992)
- Écrit par Lucie CHENU
- 1 078 mots
- 1 média
 Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le...
Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le... -
AUTOMATE
- Écrit par Jean-Claude BEAUNE , André DOYON et Lucien LIAIGRE
- 6 649 mots
- 2 médias
 Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement...
Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement... -
AUTOMATISATION
- Écrit par Jean VAN DEN BROEK D'OBRENAN
- 11 885 mots
- 12 médias
 On ne peut parler d'automatisation sans tenter de définir lerobot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter...
On ne peut parler d'automatisation sans tenter de définir lerobot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter... -
AUTO-ORGANISATION
- Écrit par Henri ATLAN
- 6 258 mots
- 1 média

Dans les artefacts, par définition construits par l'homme en vue de fins et suivant des plans déjà définis, la signification des structures et des fonctions est définie par rapport à ces fins. C'est dire que, comme ces fins elles-mêmes, extérieures à la machine qu'elles orientent,...
- Afficher les 17 références
