ROBOTS
Article modifié le
La biorobotique
S'il est une chose claire en robotique scientifique, c'est la suivante : on cherche avec une machine, si possible automatique, à réaliser des tâches qui, jusqu'ici, étaient exécutées par des hommes, soit à mains nues, soit en s'aidant d'outils manuels simples et passifs. Cette substitution à l'homme ne saurait se faire sans rappel des fonctions et caractéristiques de l'homme. Le développement de la robotique se trouve donc entraîné, peut-être par manque d'imagination, sur un terrain qui croise des données de l'anthropomorphisme dont celles ayant trait au fait que l'homme est un être vivant.
Un pas décisif dans cette direction est initié par l'évolution des tâches qu'on souhaite confier au robot. On est passé de tâches industrielles à poste fixe, relativement répétitives et programmables à l'avance, à des missions où l'adaptation permanente et immédiate du robot aux nouvelles données d'un environnement relativement inconnu à l'avance exige des capacités physiques, sensorielles et mentales de plus en plus proches de celles de l'homme.

Par ailleurs, une autre ambition récente de la robotique est l'intégration des robots dans un environnement humain. On constate alors qu'agir dans cet environnement est plus aisé si le mode de locomotion du robot offre les mêmes performances que celle de l'homme, en volume occupé, en agilité et en capacité de franchissement d'obstacles divers. Il n'y a certes pas que la locomotion bipède humaine (que l'on transforme parfois en locomotion quadrupède quand on est à quatre pattes ou en locomotion serpentiforme quand on rampe...) qui puisse satisfaire les contraintes environnementales de la société humaine. Mais on ne peut nier l'intérêt du mode de locomotion de l'homme si on peut l'imiter correctement. De même, les tâches matérielles demandées au robot étant celles habituellement exécutées par l'homme, le système de manipulation ne saurait trop s'éloigner de celui de l'homme pour répondre en toute occasion aux demandes de ce dernier. Enfin, agir en coopération ou en symbiose avec l'homme d'une manière similaire à celle d'un compagnon ou d'un collègue de travail suppose une communication homme-robot qui imite la communication homme-homme. Or celle-là est à la fois gestuelle et orale. Enfin, psychologiquement, l'homme trouvera plus de motivations d'échanges avec une machine humanoïde qu'avec une machine d'apparence vraiment différente.
Tout ceci incite à passer de la robotique à la biorobotique qui fait référence au vivant en général, au-delà de l'humanoïde ou de l'androïde que nous venons d'évoquer.
La biorobotique non anthropomorphe
La biosphère ne comporte pas que des humains mais une infinité d'espèces animales, de la bactérie au mammifère, et une infinité d'espèces végétales, du champignon au séquoia géant.
Comme le robot recherché doit être mobile, le règne végétal n'est pas pris en compte. Il n'en est pas de même pour les animaux qui présentent tous des fonctionnalités intéressantes et néanmoins quelques handicaps.
La première caractéristique d'intérêt des animaux concerne leur appareil locomoteur qui leur permet, pour un grand nombre d'espèces (les seuls déplacements terrestres étant ici pris en considération), de se mouvoir sur pratiquement toutes les terres émergées de la planète, quelle qu'en soit la nature, alors que les meilleurs véhicules fabriqués par l'homme n'ont pas accès à plus de la moitié de ces terres émergées (cf. 3. Le robot mobile). Ainsi, les invertébrés non volants multipodes, les animaux qui rampent, les mammifères quadrupèdes, les oiseaux bipèdes dans leur phase de marche ou de course offrent une immense variété de modèles performants pour se déplacer avec souplesse et dextérité, tant par la structure anatomique et physiologique du système locomoteur que par la gestion automatique de ce dernier par l'animal. Cela permet des stratégies et des tactiques de progression éminemment variées et efficaces (par exemple, un cheval a toute une série d'allures permettant d'obtenir le pas, l'amble, le trot, le galop).
Un second centre d'intérêt tient à l'intelligence des animaux que l'on cerne encore moins bien que celle de l'homme, soit par défaut d'intérêt pour le problème, soit parce que les animaux ne parlent pas et que l'on doit les comprendre par la seule observation de leurs mœurs et leurs comportements physiques.
Dans le domaine de l'intelligence, pour des applications robotiques, on divise les animaux en deux grandes catégories : ceux qui n'ont que quelques cellules nerveuses en guise de cerveau, comme l'essentiel des insectes, et qui ne peuvent donc agir que par automatismes d'origine majoritairement génétique ; ceux dont le cerveau se rapproche plus ou moins de celui de l'homme et qui seraient donc peu ou prou aptes à tenir des raisonnements.
La première catégorie est tout à fait intéressante car l'insecte grégaire, aussi bien que les insectes en essaim, survit et se reproduit sans problème dans un environnement favorable. De plus, pour les derniers, ils arrivent à construire des nids complexes et sophistiqués qui exigent une collaboration intra-essaim « intelligente ». Ces insectes nous offrent donc un autre moyen que le raisonnement cartésien pour réaliser des tâches où l'intelligence semble nécessaire (intelligence collective résultant de la double interaction individu-environnement et individu-individu). On essaie avec l'ordinateur d'imiter ces situations (vie artificielle). Ainsi, le biomimétisme, qui est très lié à la biorobotique, mais qui comporte aussi d'autres aspects, devient un domaine de recherche actif.
En ce qui concerne la seconde catégorie, c'est-à-dire les animaux possédant un cerveau d'un certain volume, elle laisse en suspens de nombreuses questions. Pourquoi un chimpanzé réputé avoir un cerveau qui fait 98 p. 100 de celui de l'homme est-il inapte à « jouer » le robot ? Pourquoi un chien est-il plus intelligent qu'un singe en ce qui concerne la compréhension du langage parlé ? Pourquoi la domestication ne peut-elle se faire que par le jeu de la récompense et de la punition ?, etc. Si on pouvait répondre à ces questions, la biorobotique en profiterait à coup sûr.
Dans la série des handicaps présentés par les animaux, eu égard aux objectifs de la biorobotique, on peut relever :
– le fait que les tâches qu'ils réalisent sont toutes orientées par le désir inné et inconscient de la survie. Ainsi, il est exceptionnel qu'une tâche naturelle, c'est-à-dire initiée par le comportement de survie d'un animal, devienne pour les hommes une tâche intéressante à imiter pour un objectif humain de transformation du monde ou de service. On peut mettre à part les tâches de déplacement ou de transport des animaux domestiqués qui restent toujours guidées par l'homme ;
– le fait que la demande de l'homme en matière de robot se porte principalement sur des tâches de manipulation. Les organes de saisie des animaux sont surtout la gueule, associée quelquefois aux pattes, et sont à l'évidence loin des performances manipulatoires du système humain bras-main (excepté pour les singes).
Les roboticiens s'intéressent beaucoup aux animaux, d'une part pour comprendre et éventuellement imiter les phénomènes de locomotion et d'intelligence collective (cf. encadré Intelligence artificielle collective et robotique), mais aussi parce que les robots animaloïdes ou zoomorphes peuvent rendre des services et trouver des marchés que ne pourraient satisfaire des humanoïdes. Ainsi, dans le domaine ludique, des robots-chien ou chat ou phoque ou autres ont vu le jour comme animaux de compagnie, malgré la faiblesse de leurs performances. Il y a même des robots-poisson. Ces types de robots ont aussi leur utilité dans l'enseignement de l'automatique et de la robotique ou de la conception des mécanismes.
De même, certaines applications seront mieux satisfaites par exemple par un robot serpentiforme que par toute autre machine. Ainsi en est-il pour la détection de présence humaine sous des décombres suite à un tremblement de terre ou toute autre catastrophe. Un serpent peut s'introduire dans de petites anfractuosités et s'approcher des victimes.
La biorobotique des animaloïdes n'est donc pas à négliger. Cependant, il est clair que si tous les problèmes de l'humanoïde étaient résolus, ceux concernant l'imitation des animaux le seraient de facto. C'est pourquoi l'humanoïde a une si grande importance.
Problèmes de la conception de biorobots
La robotique souhaite faire des robots imitant les systèmes vivants. Se pose donc le problème de la place de ces derniers dans les moyens et principes généraux de conception d'un biorobot.
La question est très délicate car les réponses ne sont pas purement scientifiques et technologiques mais ont de grandes incidences éthiques.
L'allusion au vivant peut se décliner de quatre manières évidentes dans la création d'un robot :
– On peut penser transférer totalement la conception d'un robot des sciences mécaniques et automatiques, qui en ont eu jusqu'ici l'apanage, aux sciences biologiques et génétiques. On partirait alors d'une cellule vivante et on y introduirait le code génétique de ce qui devrait donner un robot ad hoc après le développement biologique. Si cette approche n'est pas encore techniquement réalisable, parce qu'on ne sait pas modifier à la demande un code génétique pour obtenir un effet complexe mais identifié et qu'il reste beaucoup d'autres verrous scientifiques à faire sauter, on ne peut nier que les progrès effectués en matière de clonage et de génétique permettent de penser que cette approche, sous son aspect purement objectif, pourrait réussir à long terme. La difficulté éthique relève de ce que le robot désiré, en cas de fabrication d'un humanoïde, devrait avoir certaines qualifications humaines. Pour l'instant, on ne saurait que condamner une telle tentative si elle était entreprise avant de maîtriser complètement l'ensemble de la phénoménologie qui y a trait. Mais la question pourrait se poser peut-être d'une manière moins lointaine en ce qui concerne des robots animaloïdes issus de cellules animales. Quoi qu'il en soit, l'éthique devra primer sur la technologie et on ne peut citer cette voie que pour mémoire.
– Ensuite, à l'opposé, et c'est ce qui est essentiellement recherché, il peut s'agir d'une machine utilisant des matériaux non vivants qui ferait allusion au vivant en imitant correctement certaines de ses fonctionnalités et comportements complexes.
– On peut, en troisième lieu, évoquer l'utilisation d'organes ou matériaux issus du vivant qu'on grefferait sur une structure mécatronique de robot afin de la doter de meilleures performances. Cette voie n'est pas à exclure comme le montrent les travaux sur les ordinateurs biologiques ou la greffe de cellules nerveuses sur des substrats de semiconducteurs. Cependant, il s'agit aussi de réussites potentielles à long terme.
– Enfin, à l'opposé de la précédente direction, on peut tenter de greffer des organes mécatroniques sur des structures vivantes. Cette approche est connue sous le nom de bionique. La robotique n'est qu'un de ses aspects. Elle existe déjà sous la forme d'implants artificiels comme les pacemakers, les implants cochléaires ou les prothèses de hanches etc. En robotique, elle concerne aujourd'hui les prothèses complexes, surtout de bras, mains et jambes et les orthèses, systèmes externes quelquefois motorisés et destinés à suppléer les capacités défaillantes en matière de marche. Un des aspects les plus difficiles à résoudre pour les prothèses est celui de l'interface homme-prothèse. Le but ultime de l'appareillage consiste à faire en sorte que l'homme ne pense plus à sa prothèse mais l'utilise comme si elle était un membre naturel. La caricature la plus forte de cette approche, que l'on rencontre dans les fictions est « l'homme bionique », homme greffé un peu partout et jusque dans le cerveau, de moyens artificiels d'action, de communication et d'aides à la réflexion.
En définitive, les voies suivies en ce début de xxie siècle pour créer de nouveaux robots restent essentiellement la deuxième et la quatrième pour des applications particulières. La première, pour le moment, est à exclure (sauf peut-être pour la fabrication d'organes vivants, à l'exclusion d'individus) et la troisième souffre encore d'un manque de collaboration entre biotechnologues ou médecins et roboticiens pour s'enclencher véritablement.
Le degré d'imitation de l'homme dans la conception d'humanoïdes
Contrairement à ce que l'on entend dire parfois, d'une part, on ne sait pas faire du vivant avec un matériau non vivant (matériau amorphe), et, d'autre part, le robot humanoïde ou androïde que l'on cherche à réaliser n'est pas la reproduction d'un homme véritable, n'est pas l'homme artificiel. Si on peut quelquefois ressentir l'impression contraire c'est uniquement parce que, par principe, la recherche veut toujours aller plus loin ; mais on reste et restera longtemps à des années lumière de ce point de fuite.
Par ailleurs, dans le domaine des usages des robots, toute analyse montre qu'on n'a pas besoin d'un véritable homme artificiel pour pleinement satisfaire les applications les plus exigeantes. C'est d'ailleurs une chance, car on imagine le casse-tête éthique et pratique que représenterait l'irruption d'un homme artificiel dans nos sociétés (sujet classique des romans de science-fiction). Le robot restera une machine qu'on pourra supprimer sans autre état d'âme que celui, éventuel, de la facture à payer.
Dans ces conditions, la question qui se pose est de déterminer quel est le niveau d'imitation de l'homme vivant recherché dans la conception du robot.
Pour le cerner, il suffit d'examiner ce qui est exigé pour « rendre un bon service » en général, ce service s'entendant comme un service physique, matériel (dont un sous-ensemble concerne des services ou facilités mentaux déjà fournis en partie par l'informatique).
Un « bon service » exige d'abord la capacité physique de le rendre dans le milieu ou l'environnement adéquat. Pour illustrer cette notion, considérons un ordinateur qui disposerait d'algorithmes produisant la même intelligence que celle d'un cerveau humain (pure hypothèse). Il ne pourra jamais disposer des assiettes sur votre table parce qu'il n'a pas les fonctionnalités correspondantes. Cette capacité physique qu'on nomme dextérité s'exprimera par une structure de machine qui pourra se déplacer dans l'environnement humain choisi, sans trop de problèmes, et qui pourra faire les gestes correspondant à l'exécution des tâches requises pour le service envisagé. On comprend alors qu'une structure anatomique et articulée comparable à celle de l'homme doit avoir la potentialité de dextérité adéquate. Le mot « comparable » pose le problème du choix pratique de la structure, par exemple en nombre de degrés de liberté. Doit-on aller pour un bras avec une main jusqu'aux 52 degrés de liberté du bras humain avec sa main ? Techniquement c'est très difficile (nécessité d'une présence de 52 actionneurs qui engendrent des problèmes de poids, d'énergie, de volume, de contrôle, de coût etc.). Se pose donc le problème de l'optimisation entre la minimisation du nombre de degrés de liberté et la dextérité souhaitée. Dans les réalisations existantes, les robots humanoïdes complets (corps, bras et jambes) n'ont pas plus de 30 à 40 degrés de liberté au total. Et leur évaluation en termes de dextérité n'est pas vraiment effectuée.
La construction motorisée satisfaisant « sur le papier » la dextérité recherchée, celle-là doit maintenant être mise en œuvre. Ceci signifie établir un système de commande qui meut correctement la structure. Cette phase se fait d'abord en simulation, et l'on constate que, même pour une marche « en aveugle », il faut ajouter sur la structure des capteurs détectant les interactions sol-structure pour obtenir ne serait-ce que l'équilibre, par exemple. On constate aussi que la qualité de la marche sera limitée et que, par exemple, le robot ne pourra pas courir et devra se limiter à une marche cinématique, voire statique. Pourra-t-il, autre exemple, monter un escalier et sauter à pieds joints ? On va donc constater les limites de performances dans les déplacements et gestes nécessaires aux services visés, et vérifier que ces performances sont suffisantes. Autrement il faut recommencer la conception à partir de zéro. Cette phase correspond à la vérification de la dextérité du robot mais aussi à celle de son habileté. En effet, s'il lui faut dix minutes pour franchir dix mètres en ligne droite ou pour saisir un objet, il est clair que sa dextérité peut être suffisante mais que son manque d'habileté le fera rejeter.
Si le robot s'avère suffisamment habile dans ses essais de mise en œuvre « en aveugle » (c'est-à-dire piloté par un opérateur qui voit l'environnement d'évolution de la machine et lui évite les erreurs d'orientation), l'étape suivante consiste à tenter de lui donner la capacité d'agir seul, c'est-à-dire de lui donner une intelligence de base. L'atteinte de ce but passe par la réalisation de deux objectifs :
– tout d'abord, il faut doter la machine d'un système d'information sur l'environnement, un système sensoriel. Les sens qui permettent à l'homme de se situer et de progresser dans la bonne direction sont principalement la vision et le sens haptique, sans exclure l'audition.
– atteindre l'information pertinente est une chose, mais il faut la comprendre en relation avec ce que l'on a à faire. Il faut donc un système d'interprétation des informations en relation avec deux objectifs : l'exécution correcte du mouvement immédiat, et auparavant, la sélection du bon mouvement en relation avec la progression de la tâche impartie. C'est ici qu'interviennent les algorithmes dits intelligents dont il faut doter le robot.
Ce résumé de la genèse d'un humanoïde permet de mieux comprendre la philosophie de la biorobotique. On voit bien qu'un tel robot peut rendre des services aux humains, services habituellement exécutés par ceux-là. On voit aussi qu'on reste très loin d'un homme artificiel, au niveau des capacités tant physiques que mentales. Certes, du coté de l'intelligence, bien des progrès seront faits rapidement. Par exemple, dans la qualité de l'exécution du service, on sait échanger avec le robot par la simple parole et même par le geste, et il est capable de détection d'intention pour exécuter certains gestes ; on sait faire exprimer au robot des émotions par modifications des traits de ce qui lui sert de visage ; on sait le doter de raisonnements logiques pour adapter certains comportements ou décisions d'action ; on sait le faire collaborer avec l'homme ou avec d'autres robots pour exécuter ensemble certaines tâches... et beaucoup d'autres possibilités sont ou seront rapidement disponibles.
Aussi, même si on reste très loin des performances espérées, on peut certainement avancer que le robot de service, principalement sous sa forme humanoïde, est sur le point d'envahir la société comme le font aujourd'hui les automobiles ou les ordinateurs portables.
Accédez à l'intégralité de nos articles
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Philippe COIFFET : membre de l'Académie des technologies, ancien directeur de recherche au C.N.R.S.
Classification
Média
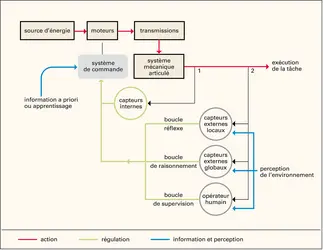
Robots : schéma de principe
Encyclopædia Universalis France
Autres références
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 291 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
-
ASIMOV ISAAC (1920-1992)
- Écrit par Lucie CHENU
- 1 078 mots
- 1 média
 Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le...
Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le... -
AUTOMATE
- Écrit par Jean-Claude BEAUNE , André DOYON et Lucien LIAIGRE
- 6 649 mots
- 2 médias
 Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement...
Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement... -
AUTOMATISATION
- Écrit par Jean VAN DEN BROEK D'OBRENAN
- 11 885 mots
- 12 médias
 On ne peut parler d'automatisation sans tenter de définir lerobot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter...
On ne peut parler d'automatisation sans tenter de définir lerobot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter... -
AUTO-ORGANISATION
- Écrit par Henri ATLAN
- 6 258 mots
- 1 média

Dans les artefacts, par définition construits par l'homme en vue de fins et suivant des plans déjà définis, la signification des structures et des fonctions est définie par rapport à ces fins. C'est dire que, comme ces fins elles-mêmes, extérieures à la machine qu'elles orientent,...
- Afficher les 17 références
Voir aussi
- MOTEURS ÉLECTRIQUES
- PROGRAMME, informatique
- COMMANDE
- ASSERVIS SYSTÈMES
- TRANSMISSION, mécanique
- ACTIONNEURS
- FORMES RECONNAISSANCE DES
- RÉALITÉ VIRTUELLE
- CAMÉRA
- CAPTEURS
- VÉRINS
- INFORMATION, informatique et télécommunications
- DEGRÉ DE LIBERTÉ
- TÉLÉOPÉRATION
- TRAJECTOIRE
- SIMULATION
- INTERACTIVITÉ, informatique
- INTERFACE, informatique
- SENSORIELS ORGANES
- TÉLÉMANIPULATION
- BOUCLE, automatique
- ARTICULATIONS, robotique
- PERCEPTION, robotique
- ROBOTS MOBILES
- ROBOTIQUE HUMANOÏDE
- BIOROBOTIQUE
- TÉLÉPRÉSENCE
- TÉLÉEXISTENCE
- APPRENTISSAGE, informatique et robotique
- CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO)
- GPS (Global Positioning System)
- PERFORMANCES, technologie
- PRODUCTIQUE
- CFAO (conception et fabrication assistées par ordinateur)
- DIALOGUE HOMME-MACHINE
- ATELIER FLEXIBLE
- FLEXIBILITÉ, productique
- MANIPULATION, robotique
- ORGANE TERMINAL, robotique
