
- 1. Points réguliers
- 2. Points singuliers non dégénérés
- 3. Espaces de jets et théorèmes de transversalité de Thom
- 4. Points singuliers de détermination finie et fonctions T.S.F.
- 5. Codimension d'une fonction
- 6. Déformation universelle d'un germe de fonction de détermination finie
- 7. Stratification de C∞(N, R) − Σ et familles « génériques » de fonctions
- 8. Classification des germes de petite codimension μ
- 9. Lien avec la théorie des déformations des germes d'hypersurfaces analytiques et l'équisingularité
- 10. Le cas des applications
- 11. Quelques problèmes globaux
- 12. Bibliographie
SINGULARITÉS DES FONCTIONS DIFFÉRENTIABLES, la théorie mathématique et ses applications
Article modifié le
Déformation universelle d'un germe de fonction de détermination finie
Le chapitre précédent est censé rendre naturelles les définitions suivantes (Thom, Mather...).
Si f ∈ En, on appelle R-codimension (right-codimension) de f la codimension dans En de l'idéal jacobien J(f ) considéré comme sous-espace vectoriel :

Nous supposons cette dimension finie ; ce qui équivaut, d'après le chapitre 4, à supposer f de détermination finie. Le R de R-codimension signifie right, c'est-à-dire droite ; en effet, on ne considère que l'action « à droite » de Diff Rn définie par α(ϕ, f ) = f ∘ ϕ−1 en oubliant l'action « à gauche » de Diff R.

Déformation continue d'un germe
Encyclopædia Universalis France
On appelle déformation à l paramètres de f un germe F ∈ En+l représenté par :

Étant donné une déformation F, on lui associe le germe d'application :

Deux déformations F et G de f sont isomorphes s'il existe un germe de difféomorphisme :


On peut interpréter Φ comme une famille à l paramètres de difféomorphismes définis sur un ouvert fixé de Rn. Remarquons que seul x ↦ Φ(x, 0) préserve l'origine : demander cela pour tout t revient à considérer l'action sur En du groupe Ln des germes de difféomorphismes de Rn, 0 ; l'espace tangent en f à l'orbite de f est ici MnJ(f ). Lorsque μ(f ) < + ∞, on montre que dim En/MnJ(f ) − dim En/J(f ) = n, ce qui correspond aux n degrés de liberté accordés à Φ(x, t).
Si h : Rm, 0 → Rl, 0 est un germe d'application, on définit la déformation image réciproqueh*F de F par la formule h*F(x, t) = F(x, h(t)). Une déformation F de f est dite verselle si toute autre déformation de f est isomorphe à une image réciproque de F ; elle est dite universelle (ou miniverselle) si de plus l = μ(f ). On voit facilement que, si F et G sont deux déformations universelles de f, F est isomorphe à l'image réciproque de G par un germe de difféomorphisme.
Dans la situation globale du chapitre précédent, un paramétrage régulier de S au voisinage de f mérite le nom de déformation universelle de f.
La notion opposée est celle de déformation triviale, c'est-à-dire telle que ft soit indépendant de t. La déformation F est triviale si et seulement si ∂F/∂t appartient à l'idéal J(F) de En+l, ce qui implique, pour t = 0, que :

L'analogue du théorème de structure du chapitre 5 s'énonce alors : Soit f ∈ En un germe de R-codimension finie μ. Une déformation F (à μ paramètres) de f est universelle si et seulement si les classes des germes ∂F/∂ti(x, 0), i = 1, ..., μ, engendrent le R-espace vectoriel En/J(f ).
Nous indiquons une démonstration très simple, due à J. Martinet, de ce théorème dans le cas du germe f ∈ E1 défini par f (x) = xn. Ici J(f ) = M1n−1 et E1/J(f ) ≃ Rn−1 est engendré par les classes des germes 1, x, ..., xn−2 ; un candidat à être une déformation universelle de f est donc :

Soit G(x, s) = xn + g(x, s), avec g(x, 0) = 0, une déformation à 1 paramètre de xn (le[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Alain CHENCINER : professeur à l'université de Paris-VII
Classification
Médias
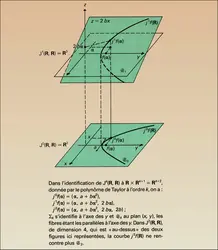
Jets d'une fonction quadratique d'une variable
Encyclopædia Universalis France
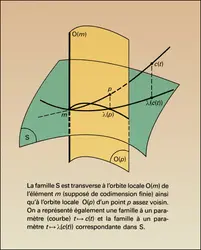
Caractère universel d'une famille transverse
Encyclopædia Universalis France
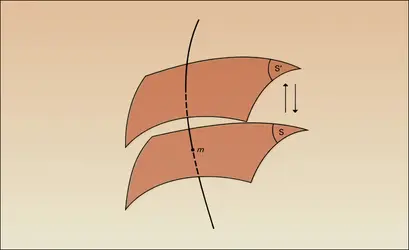
Stabilité d'une famille transverse
Encyclopædia Universalis France
Autres références
-
CALCUL INFINITÉSIMAL - Calcul à plusieurs variables
- Écrit par Georges GLAESER
- 5 445 mots
En 1925, le mathématicien américain Marston Morse a inauguré l'étude dessingularités des fonctions de classe Cm en montrant que l'on pouvait approcher toute fonction numérique f de classe Cm à n variables par des fonctions dont les seuls points singuliers sont des points isolés critiques... -
CATASTROPHES THÉORIE DES
- Écrit par Jean PETITOT
- 5 101 mots
- 10 médias
 ...Globalement, le lieu critique C de π est une courbe régulière (sans singularités) de Σ dont l'image K est une ligne (de points plis) ne pouvant admettre comme singularités que des cusps ou des self-intersections transversales, correspondant à des singularités semi-locales (figure : situation globale avec self-intersections)....
...Globalement, le lieu critique C de π est une courbe régulière (sans singularités) de Σ dont l'image K est une ligne (de points plis) ne pouvant admettre comme singularités que des cusps ou des self-intersections transversales, correspondant à des singularités semi-locales (figure : situation globale avec self-intersections)....
Voir aussi
- ORBITE, mathématiques
- GERMES ALGÈBRE DES
- CODIMENSION, mathématiques
- FIBRÉ, mathématiques
- POINT SINGULIER
- TOPOLOGIE DIFFÉRENTIELLE
- POINT RÉGULIER
- WHITNEY HASSLER (1907-1989)
- DIFFÉOMORPHISME
- IMMERSION, mathématiques
- FONCTIONS IMPLICITES THÉORÈME DES
- TRANSVERSALITÉ, mathématiques
- MORSE LEMME DE
- MORSE FONCTION DE
- FRÉCHET ESPACE DE
- JACOBIEN IDÉAL
- DÉFORMATION, mathématiques
- DÉPLOIEMENT, mathématiques
- JET D'APPLICATION
- SARD LEMME DE
- THOM THÉORÈME DE TRANSVERSALITÉ DE
- BIFURCATION, mathématiques
- GERMES, mathématiques
- WEIERSTRASS THÉORÈME DE PRÉPARATION DE
- SINGULARITÉS, mathématiques
