
STABILITÉ
La méthode de Liapounoff
Considérons le système différentiel :



Si V(x, t ) est une fonction à valeurs scalaires, pourvue de dérivées partielles premières continues dans Ω(a, τ ), l'étude de sa variation le long d'une trajectoire (Γ), définie par x = x(t ) solution du système différentiel, peut aisément se faire en étudiant le signe de :
On dira que la fonction V(x, t ) a un signe constant si, dans un domaine Ω(a,τ) convenable, elle est différentiable, si elle ne prend que des valeurs d'un même signe ou si elle est nulle, et si V(0, t ) = 0. Elle sera dite positive ou négative selon la nature de ce signe.
Si W(x) est une fonction indépendante du temps, on dira que W est définie positive (ou définie négative) si elle est différentiable et positive (ou négative) dans un Ω(a) convenable et si elle ne s'annule qu'à l'origine.
La fonction V(x, t ) sera dite définie positive (ou définie négative) s'il existe une fonction définie positive W(x) telle que V − W (ou − [V − W]) est positive dans un Ω(a, τ) et si V(0, t ) = 0.
Premier théorème de Liapounoff. Si, pour le système différentiel, il existe une fonction définie V(x, t ) dont la dérivée dV/dt est d'un signe constant opposé à celui de V, alors x = 0 est une solution stable du système.
Deuxième théorème de Liapounoff. Si, pour le système différentiel, et dans un domaine Ω(a, τ), les fonctions V(x, t ) et V′(x, t ) sont définies et de signes contraires, et si V(x, t ) tend vers 0 quand x → 0 uniformément par rapport à t, alors x = 0 est une solution asymptotiquement stable de ce système.
Troisième théorème de Liapounoff. Si, pour le système différentiel, on a pu construire une fonction V(x, t ) tendant vers 0 quand x → 0 uniformément par rapport à t, telle que V′(x, t ) est définie (positive ou négative) dans Ω(a, τ) et que, pour chaque valeur t ≥ τ et pour chaque valeur de η positif choisi aussi petit qu'on veut, V peut prendre dans ∥x∥ < η le signe de V′, alors l'origine est instable pour le système différentiel.
Théorème de Tchetaev. Considérant le système dx/dt = f (x), on suppose connue une fonction V(x) telle que :
1. V(x) et V′(x) = f (x) ( grad V sont positifs dans Ω1, sous-ensemble de la boule ∥x∥ ≤ a ;
2. V(x) = 0 sur Ω−1 ∩ Ω−2, où Ω2 désigne le complémentaire de Ω1 dans ∥x∥ ≤ a, où Ω−1 et Ω−2 sont les fermetures respectives de Ω1 et Ω2 ;
3. x = 0 appartient à Ω−1 ∩ Ω−2 et f (0) = 0.
En conclusion, x = 0 est une solution instable de dx/dt = f (x).
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
Classification
Médias
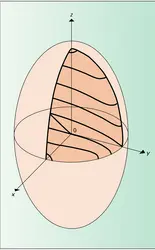
Demi-ellipse limite
Encyclopædia Universalis France
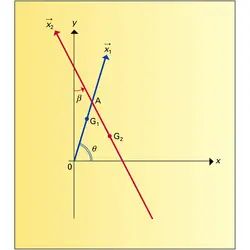
Centre d'inertie d'un solide
Encyclopædia Universalis France
Autres références
-
ARNOLD VLADIMIR (1937-2010)
- Écrit par Bernard PIRE
- 835 mots
Le mathématicien russe Vladimir Igorevich Arnold, décédé le 3 juin 2010 à Paris des suites d'une opération chirurgicale, a marqué le développement des mathématiques dans de nombreux domaines. Né le 12 juin 1937 à Odessa en Ukraine dans une famille dont plusieurs membres étaient d'excellents scientifiques,...
-
AUTOMATIQUE
- Écrit par Hisham ABOU-KANDIL et Henri BOURLÈS
- 11 646 mots
L'unedes difficultés majeures que l'on rencontre avec les systèmes bouclés est la possible instabilité de ceux-ci. Disons en première approximation qu'un système est stable lorsque toutes ses variables convergent vers des valeurs finies, dites « valeurs d'équilibre », et instable... -
CATASTROPHES THÉORIE DES
- Écrit par Jean PETITOT
- 5 100 mots
- 10 médias
 Admettons alors ce truisme qu'un système ne peut exister que s'il est structurellement stable (résistant aux perturbations infinitésimales). La grande découverte de Thom est que la stabilité structurelle est une contrainte très forte, si forte qu'elle impose une limite draconienne à la complexité morphologique...
Admettons alors ce truisme qu'un système ne peut exister que s'il est structurellement stable (résistant aux perturbations infinitésimales). La grande découverte de Thom est que la stabilité structurelle est une contrainte très forte, si forte qu'elle impose une limite draconienne à la complexité morphologique... -
DYNAMIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 9 671 mots
- 4 médias
 Par définition, on dit qu'une valeur qi,e d'équilibre pour un paramètre qi est stable si, et seulement si, quels que soient ε > 0 et ε′ > 0 suffisamment petits :
Par définition, on dit qu'une valeur qi,e d'équilibre pour un paramètre qi est stable si, et seulement si, quels que soient ε > 0 et ε′ > 0 suffisamment petits :
- Afficher les 17 références
