
STABILITÉ
Article modifié le
Exemples de stabilité
Stabilité de la rotation autour d'un axe principal d'un solide mobile autour de son centre d'inertie
Les équations du mouvement, dans les notations classiques, sont :

A, B, et C désignent les moments principaux d'inertie, et p, q et r les composantes sur les axes principaux de la rotation instantanée du solide.
Étudions la stabilité de la solution : p = 0, q = 0 et r = r0 > 0.
Introduisons les nouvelles variables ξ, η et ζ :

On obtient le système :
Si A ≥ B > C, nous prendrons :

Si A ≤ B < C, nous prendrons :

Enfin, si A < C < B, nous prendrons V = ξ ( η dont la dérivée est :

Par le théorème de Tchetaev, on reconnaît qu'il y a instabilité.
Dans la technique de linéarisation, on aurait écrit directement :

C'est-à-dire que, par élimination de ξ ou de η, on obtient l'équation du second ordre :

Oscillateurs linéaires associés aux mouvements « voisins » du mouvement stationnaire d'un ensemble mécanique
Reprenons l'étude commencée au chapitre 2 et engageons la linéarisation des équations. Si nous calculons Ψ′ et ϕ′ à l'aide des deux intégrales premières linéaires en Ψ′ et ϕ′ et si nous reportons le résultat dans l'équation du moment nodal, nous trouvons une équation différentielle du second ordre en θ qui est valable dans tous les cas de mouvement :

Pour un mouvement stationnaire, on doit avoir :



Cette condition est celle de la stabilité de l'oscillateur associé aux mouvements « voisins » du mouvement stationnaire étudié.
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
Classification
Médias
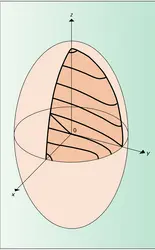
Demi-ellipse limite
Encyclopædia Universalis France
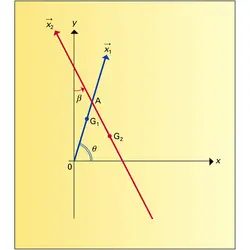
Centre d'inertie d'un solide
Encyclopædia Universalis France
Autres références
-
ARNOLD VLADIMIR (1937-2010)
- Écrit par Bernard PIRE
- 835 mots
Le mathématicien russe Vladimir Igorevich Arnold, décédé le 3 juin 2010 à Paris des suites d'une opération chirurgicale, a marqué le développement des mathématiques dans de nombreux domaines. Né le 12 juin 1937 à Odessa en Ukraine dans une famille dont plusieurs membres étaient d'excellents scientifiques,...
-
AUTOMATIQUE
- Écrit par Hisham ABOU-KANDIL et Henri BOURLÈS
- 11 647 mots
L'unedes difficultés majeures que l'on rencontre avec les systèmes bouclés est la possible instabilité de ceux-ci. Disons en première approximation qu'un système est stable lorsque toutes ses variables convergent vers des valeurs finies, dites « valeurs d'équilibre », et instable... -
CATASTROPHES THÉORIE DES
- Écrit par Jean PETITOT
- 5 101 mots
- 10 médias
 Admettons alors ce truisme qu'un système ne peut exister que s'il est structurellementstable (résistant aux perturbations infinitésimales). La grande découverte de Thom est que la stabilité structurelle est une contrainte très forte, si forte qu'elle impose une limite draconienne à la complexité morphologique...
Admettons alors ce truisme qu'un système ne peut exister que s'il est structurellementstable (résistant aux perturbations infinitésimales). La grande découverte de Thom est que la stabilité structurelle est une contrainte très forte, si forte qu'elle impose une limite draconienne à la complexité morphologique... -
DYNAMIQUE
- Écrit par Michel CAZIN et Jeanine MOREL
- 9 677 mots
- 4 médias
 Par définition, on dit qu'une valeur qi,e d'équilibre pour un paramètre qi est stable si, et seulement si, quels que soient ε > 0 et ε′ > 0 suffisamment petits :
Par définition, on dit qu'une valeur qi,e d'équilibre pour un paramètre qi est stable si, et seulement si, quels que soient ε > 0 et ε′ > 0 suffisamment petits :
- Afficher les 17 références
Voir aussi
