
- 1. Vers la géométrie symplectique
- 2. Géométrie de Poisson
- 3. Le 2-vecteur associé à une structure de Poisson
- 4. Le théorème de décomposition locale d'Alan Weinstein
- 5. Le feuilletage symplectique
- 6. Algébroïdes de Lie
- 7. Le problème de réalisation symplectique
- 8. Étude locale
- 9. Structures de Poisson et quantification
- 10. Structures de Poisson spéciales
- 11. Mécanique de Nambu
- 12. Les structures de Nambu d'après Tahktajan
- 13. Appendice
- 14. Bibliographie
POISSON ET NAMBU STRUCTURES DE
Article modifié le
Faisant référence à la mécanique analytique et à ses anciens maîtres Joseph Louis Lagrange (1736-1813) et Pierre Simon de Laplace (1749-1827), Siméon Denis Poisson (1781-1840) écrit, dans l'introduction de son mémoire au Journal de l'École polytechnique de 1809 : « Il ne semblait pas que cette importante théorie pût encore être perfectionnée, lorsque les deux géomètres qui ont le plus contribué à la rendre complète en ont fait de nouveau le sujet de leurs méditations... » Il annonce ainsi qu'il va présenter l'amélioration suivante de la théorie : il considère les expressions (1)

En modernisant très légèrement le langage de S. D. Poisson, on voit que son crochet est bien défini sur les « espaces de phase » T∗Q, les espaces cotangents des « espaces de configuration » Q. L'introduction de la notion de variété symplectique dans les années 1950-1960 donne un cadre bien plus général où un crochet analogue peut se définir. Ce crochet donne à l'espace des fonctions définies sur ces variétés une structure d'algèbre de Lie ; il vérifie aussi l'identité de Leibniz que nous présenterons dans le chapitre 2 (Géométrie de Poisson). En 1977, André Lichnerowicz (1915-1998) a proposé la définition la plus générale pour les crochets de Poisson sur une variété quelconque : ce sont les opérations binaires sur l'espace des fonctions qui vérifient ces deux propriétés. Sous cette forme on voit que les crochets de Poisson mettent dans un même cadre des objets mathématiques aussi divers que les variétés symplectiques et les algèbres de Lie de dimension finie. C'est l'article fondateur « The Local Structure of Poisson manifolds » (1983) d'Alan Weinstein qui a mis en évidence l'intérêt de l'étude géométrique de ces notions.
Des crochets de Poisson très utiles sont apparus dans toutes sortes de situations : singularités de fonctions, groupes de Lie, groupes quantiques, espaces de modules, algébroïdes, systèmes intégrables, quantification... Une des consécrations de l'intérêt de cette notion est que l'on a une correspondance (à peu près bijective) entre les crochets de Poisson et les déformations associatives du produit usuel des fonctions (sur une variété différentiable donnée).
Différentes généralisations du crochet de Poisson sont apparues ; certaines incluent, par exemple, les structures de contact. Les structures de Nambu, développées depuis les années 1990 à partir d'une tentative d'extension de la mécanique hamiltonienne, sont des crochets de plus de deux fonctions. Elles s'avèrent utiles au moins pour l'étude des feuilletages à singularités.
Vers la géométrie symplectique
Dans le formalisme de la mécanique lagrangienne (cf. mécanique analytique), les solutions des systèmes mécaniques classiques sont données par les équations de Lagrange (2)

La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Jean Paul DUFOUR : professeur à l'université Montpellier-II (département de mathématique)
Classification
Médias
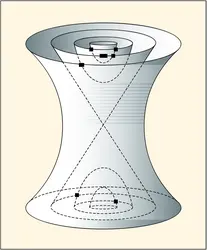
Feuilletage symplectique d'une structure de Poisson linéaire
Encyclopædia Universalis France
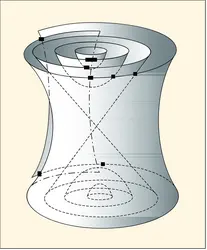
Feuilletage symplectique d'une structure de Poisson non linéaire
Encyclopædia Universalis France
Voir aussi
- HAMILTONIEN
- POISSON CROCHET DE
- HAMILTON ÉQUATIONS CANONIQUES DE
- LAGRANGE ÉQUATIONS DE
- FIBRÉ, mathématiques
- LIE ALGÈBRES DE
- VARIÉTÉS SYMPLECTIQUES
- DARBOUX LEMME DE
- JACOBI IDENTITÉ DE
- LEIBNIZ IDENTITÉ DE
- WEINSTEIN THÉORÈME DE
- POISSON VARIÉTÉ DE
- LIE ALGÉBROÏDE DE
- LIE GROUPOÏDE DE
- NAMBU STRUCTURES DE
- SCHOUTEN CROCHETS DE
- FEUILLETAGES, mathématiques
- LAGRANGIEN
