
VIBRATIONS MÉCANIQUES
Article modifié le
Vibrations d'un système à un degré de liberté
Vibrations libres
L'équation différentielle régissant les petits mouvements à un paramètre se présente sous la forme :

Pour qu'il y ait équilibre, le temps t ne doit pas apparaître explicitement au second membre de cette équation. L'équation devient dans ce cas :

Posons q = q0 + ε, q′ = ε′, q″ = ε″.
Le développement de la fonction F(q, q′), limité au premier ordre, s'écrit au voisinage de (q0, 0) :




Cette équation peut être mise sous forme intrinsèque (indépendante des unités utilisées au cours des calculs numériques) ; à cet effet, on pose :

Modèle à un paramètre avec amortissement négligeable

Figure 1
Encyclopædia Universalis France
Soit un solide (S) en liaison rotoïde d'axe horizontal Oz. Ce solide est soumis aux efforts de liaison exercés par le rotoïde que l'on suppose parfait, aux efforts de pesanteur dont on désigne par g la densité vectorielle par unité de masse et, enfin, à une force F créée par un ressort dont une extrémité est fixée en un point A au bâti galiléen et dont l'autre extrémité est fixée en un point H de (S) tel que OH = hxs. D'autre part, on suppose que le centre d'inertie G de (S) est situé sur la droite OH, c'est-à-dire que OG = axs ; la longueur naturelle de ce ressort est l, et k est la constante de dureté longitudinale ; l'extrémité A du ressort est accrochée en un point de coordonnées polaires (ρ, β) :


Nous supposerons qu'à l'équilibre l'angle α = (x, xs) est nul. L'équation du moment dynamique en O en projection scalaire sur l'axe z s'écrit :


On va appliquer ce résultat à l'étude de deux cas : celui où y est vertical ascendant (g = − gy), puis le cas où x est vertical descendant (g ≡ gx).
Dans le premier cas, on a :


Figure 2
Encyclopædia Universalis France
À l'équilibre, OG est horizontal par hypothèse, c'est-à-dire que l'équation du mouvement :


On remarque (ce qui est évident intuitivement) qu'à l'équilibre, d'une part, le > l si sin β > 0 (ressort travaillant à la traction) et, d'autre part, le < l si sin β < 0 (ressort travaillant à la compression).
L'équation de l'oscillateur linéaire associé au problème étudié permet de déterminer les petits mouvements autour de la valeur α = 0 à partir de :

Supposons pour fixer les idées que :


Dans le second cas, on a :

Le ressort doit être assez dur, avec k > mga/h2, pour qu'un équilibre où OG reste horizontal soit stable et que l'équation de l'oscillateur linéaire associé soit donc une équation de vibration.[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
Classification
Médias
Figure 1
Encyclopædia Universalis France

Ressort ne jouant aucun rôle
Encyclopædia Universalis France
Figure 2
Encyclopædia Universalis France
Autres références
-
AUDITION - Acoustique physiologique
- Écrit par Pierre BONFILS , Yves GALIFRET et Didier LAVERGNE
- 14 814 mots
- 17 médias
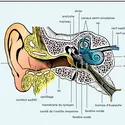 La transmission desvibrations du milieu aérien au milieu liquidien de la cochlée pose des problèmes de physique dans le détail desquels nous n'entrerons pas. Rappelons seulement que si une onde acoustique se propageant dans l'air atteint perpendiculairement la surface d'un lac, par exemple, le millième...
La transmission desvibrations du milieu aérien au milieu liquidien de la cochlée pose des problèmes de physique dans le détail desquels nous n'entrerons pas. Rappelons seulement que si une onde acoustique se propageant dans l'air atteint perpendiculairement la surface d'un lac, par exemple, le millième... -
AUTOMOBILE - Conception
- Écrit par Jean-Paul MANCEAU , Alfred MOUSTACCHI et Jean-Pierre VÉROLLET
- 10 562 mots
- 7 médias
 L' amélioration du confort vibratoire et acoustique est considérable, que ce soit pour les occupants du véhicule, sous l'effet de la concurrence (ce type de confort étant associé à la notion de solidité ou de qualité haut de gamme), ou pour le voisinage (bruit extérieur). Ainsi, le niveau réglementaire...
L' amélioration du confort vibratoire et acoustique est considérable, que ce soit pour les occupants du véhicule, sous l'effet de la concurrence (ce type de confort étant associé à la notion de solidité ou de qualité haut de gamme), ou pour le voisinage (bruit extérieur). Ainsi, le niveau réglementaire... -
ÉLECTRO-ACOUSTIQUE
- Écrit par Éric de LAMARE
- 7 348 mots
- 10 médias
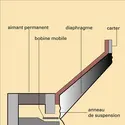 Le courant électrique, lesvibrations mécaniques, les ondes sonores sont tous des phénomènes vibratoires. Il n'est donc pas étonnant que, en comparant les équations qui régissent certains circuits électriques à celles qui servent à décrire des régimes vibratoires, mécaniques d'abord puis, plus tard,...
Le courant électrique, lesvibrations mécaniques, les ondes sonores sont tous des phénomènes vibratoires. Il n'est donc pas étonnant que, en comparant les équations qui régissent certains circuits électriques à celles qui servent à décrire des régimes vibratoires, mécaniques d'abord puis, plus tard,... -
INFRASONS
- Écrit par Leonid PIMONOW
- 3 252 mots
- 3 médias

On entend par infrasons des vibrations mécaniques de basses fréquences dont la gamme est définie par les propriétés de l'ouïe humaine. Si les périodes des vibrations acoustiques se répètent plus fréquemment que quelque 16 à 20 fois par seconde, l'oreille commence à les intégrer. Apparaît alors la...
- Afficher les 14 références
Voir aussi
- FRÉQUENCE, physique
- MEMBRANES VIBRANTES
- VERGES VIBRANTES
- CORDES VIBRANTES
- PÉRIODIQUES PHÉNOMÈNES
- RESSORTS
- ADMITTANCE, physique
- ÉQUILIBRE MÉCANIQUE
- CHOC, mécanique
- LAGRANGE ÉQUATIONS DE
- PÉRIODE, physique
- SOLIDE MÉCANIQUE DU
- COULOMB MODULE DE ou MODULE DE CISAILLEMENT ou MODULE DE GLISSEMENT
- POISSON COEFFICIENT DE
- YOUNG MODULE DE ou MODULE D'ÉLASTICITÉ LONGITUDINALE
- PSEUDO-PÉRIODE
- TORSION
- AMORTISSEMENT, physique
- DÉCRÉMENT LOGARITHMIQUE
- COUPLAGE, mécanique classique
- FLEXION, physique
- ROULIS
- TANGAGE
- MODÈLE, physique
- OSCILLATION, mécanique
- AMPLITUDE, physique
